サンプルカタログ/データ
cROBOSim を操作するためのサンプルモデルとカタログを用意しています。
保存場所:インストール時に指定したディレクトリ
特に指定せず、インストールした場合は、以下に保存されます。
C:¥Program Files¥icROBOSim¥〔バージョン番号〕¥Samples
-
お客様の権限により、Cドライブの Program Files から正常に起動しない場合があります。
デスクトップ等にコピーしてご利用ください。
サンプルカタログ
〔1〕IRONCAD のカタログブラウザから [開く] をクリックします。

〔2〕Samples フォルダから [Robots.icc] を選択し、[開く] をクリックします。

以下のカタログが読み込まれます。
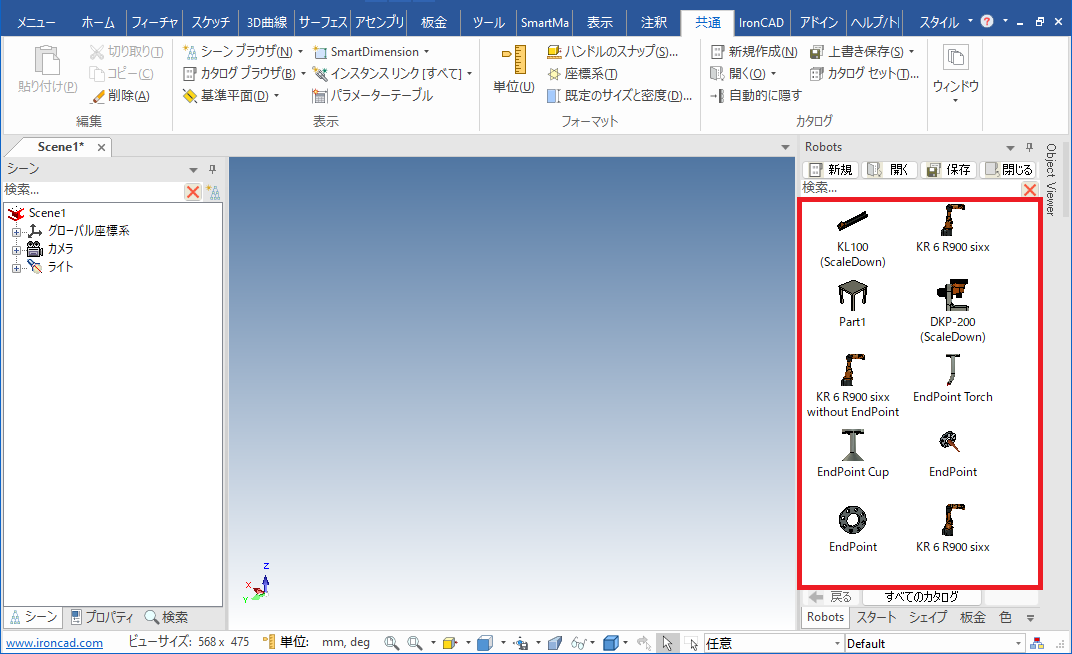
〔3〕カタログからドロップしてご利用ください。
サンプルデータ
Samples フォルダには、すでにシミュレーションされたサンプルが用意されています。
サンプルカタログのデータを使用したものも多くあります。
icROBOSim でシミュレーションを作成すると、IRONCAD ファイル名と同じ名前の拡張子 [.rsm]ファイル が作成されます。
-
rsmファイル を削除するとシミュレーションしたデータが消えますのでご注意ください。
サンプルデータ一覧
| ファイル名 | 内容 |
|---|---|
| ArcPoint | ロボットハンドの円弧動作 |
| Assembly | 簡易治具の組立 |
| AssemblyInstruction | 1パーツ取付け |
| Bolt & Nut | ボルトに対するナットの締め付け |
| HandOver | 2台のロボットによるワークの受け渡し |
| MultiRobot | 2台のロボットとポジショナーによる自動化 |
| PickPlace (Block) | ワークの吸着ピッキング |
| PickPlace (Conveyor) | コンベアに流れるワークをロボットでピッキング |
| PickPlace (Rail) | 止まったワークをロボット自体が移動してピッキング |
| PickPlace (Scara) | スカラロボットによるピッキング |
| UniversalJoint | ユニバーサルジョイントシミュレーション |
| XYTable | 2方向の直動シミュレーション:XY方向テーブル |