登録したデータが動かない
原因
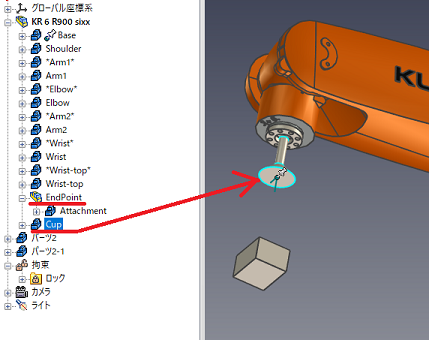
〔1〕ロボットデータの先端に取り付けるハンド部が EndPointアセンブリ の外に配置・拘束されている。
弊社提供のロボットは、icROBOSim で動作させるため、アセンブリ構成が決まっています。
お客様側で設計・設定されるハンドデータや中継Boxなどは、必ず設置する部位のアセンブリ内に配置してください。
例) ロボットハンド :EndPointアセンブリ内
〔2〕古いバージョンの icROBOSim を使用している。
古いバージョンの場合、一度 RSSequencer へ登録後、そのデータを IRONCAD内 から削除してもRSSequencer内 に残る場合があります。 残った要素は無効扱いとなりますが、その要素よりも下に登録しているデータは動作が反映されません。
※icROBOSim2021(v0.12.1.21以降)、icROBOSim2022では改善済
対処法
〔1〕ロボットと一緒に動かすハンドやワークデータは、EndPointアセンブリ内 に移動してください。
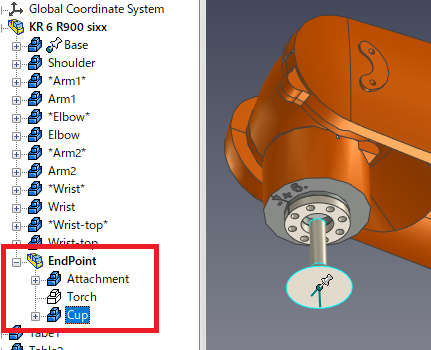
TriBall で配置完了後に、RSSequencer へ登録します。
-
icROBOSim用 ロボットデータのアセンブリ直下のツリー構成を変更すると、他に登録した要素が登録したイベント通りに動かない要因となりますのでご注意ください。
〔2〕アンインストールし、最新の icROBOSim をご使用ください。