Joint Angle (各軸動作)
本項目では [Joint Angle] の動作イベント について説明します。
Joint Angle は、"ロボット" のみに指定可能なイベントです。
ロボットの動作は基本的に TriBall を使用し、先端(ハンド)部を移動して作成しますが、 Joint Angle で登録した位置は先端(ハンド)部の始点と終点の姿勢を重要視するため、途中経路は問題とせず、ロボット任せで移動します。
-
PTP制御 と同様のコマンドです。
ポイント間をロボットが動きやすい姿勢で移動します。
※サンプルデータで練習してみましょう。
Samplesフォルダ から「ArcPoint.ics」を開きます。
手順1. 新規でロボットを登録する
※RSSequencer は、1つの IRONCADデータ に対して 8個の異なるシミュレーションを作成することができます。
〔1〕RSSequencer画面 の一番左側には縦方向にシートがあります。
[#2]をクリックします。
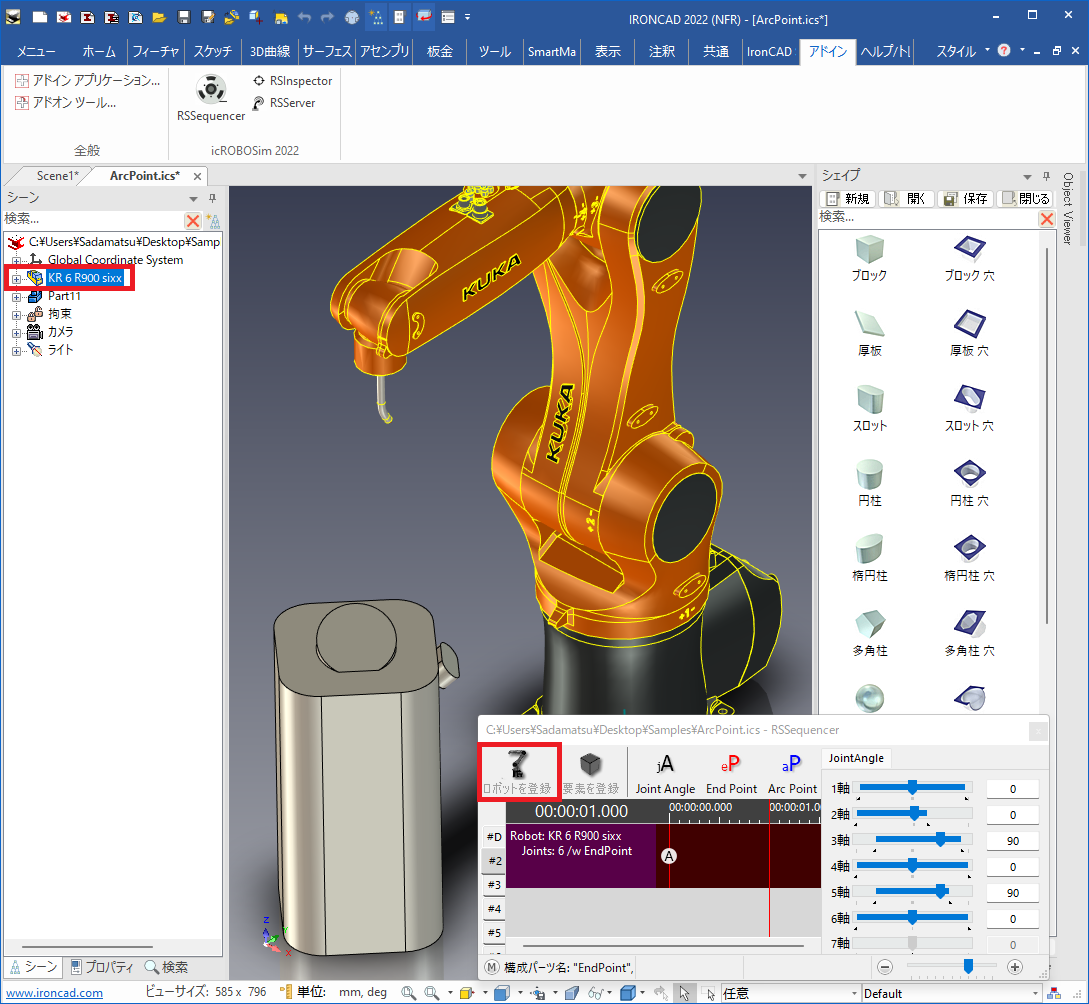
〔2〕ロボットアセンブリを選択し、[ロボットに登録] をクリックします。
手順2. 位置を登録する
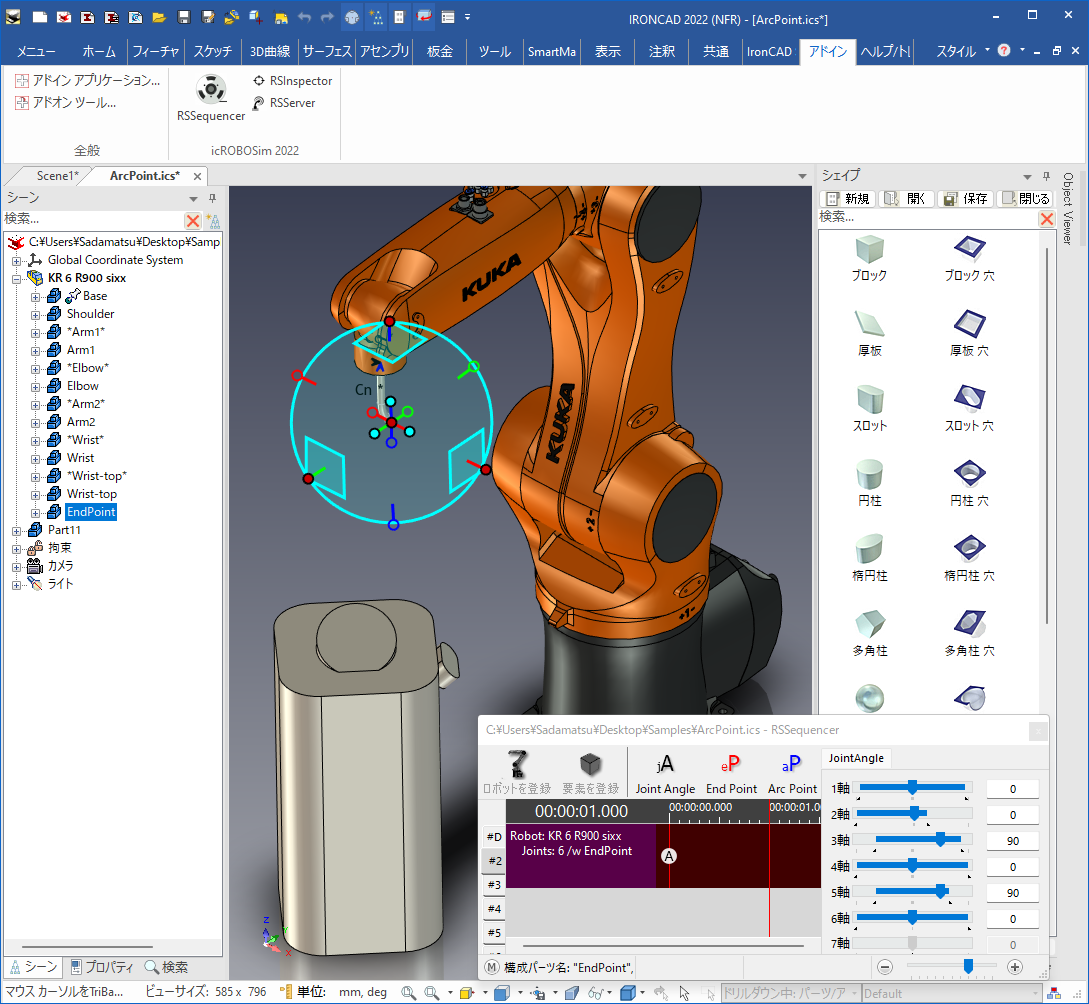
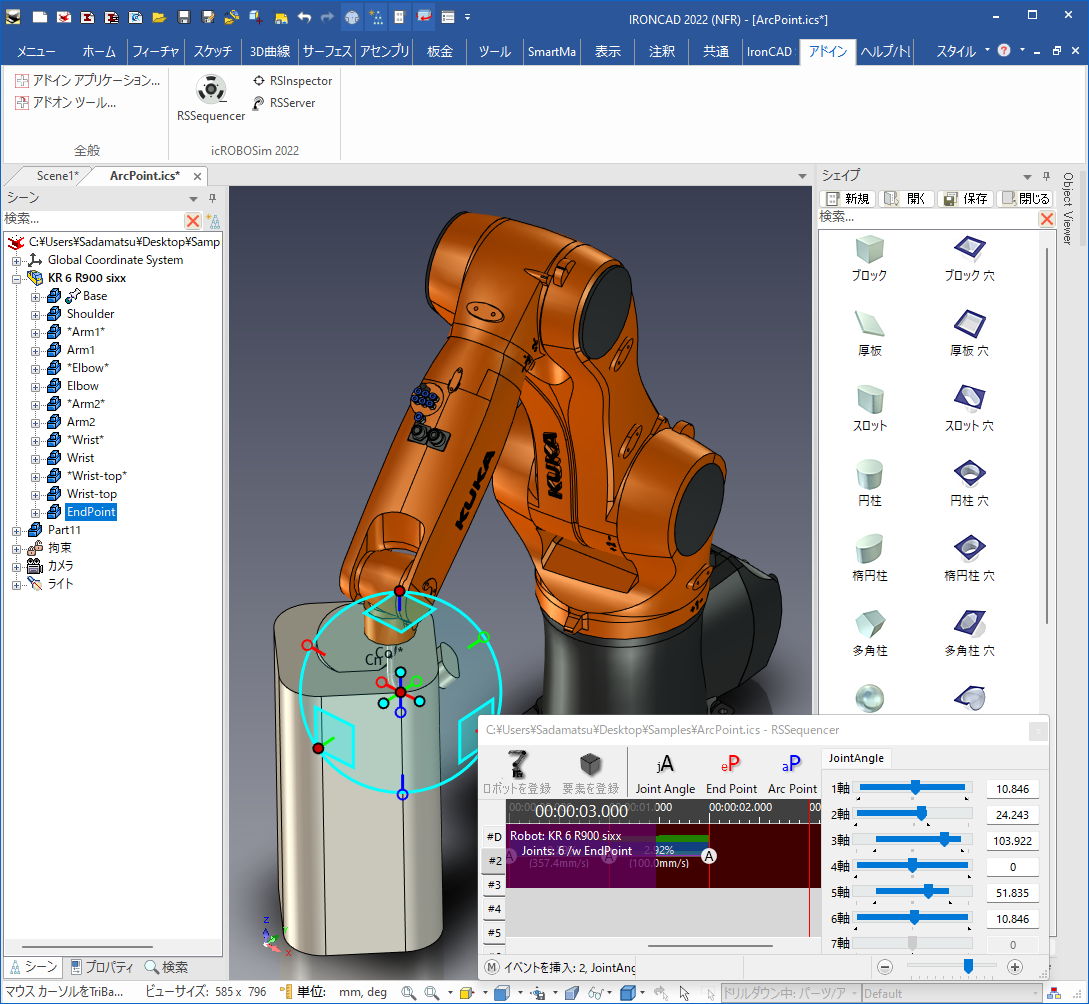
〔1〕ロボットアセンブリを開き、EndPointアセンブリ を選択します。
続けて、TriBall を起動します。
〔2〕TriBall でブロックの下図の位置に移動し、[Joint Angle] をクリックします。
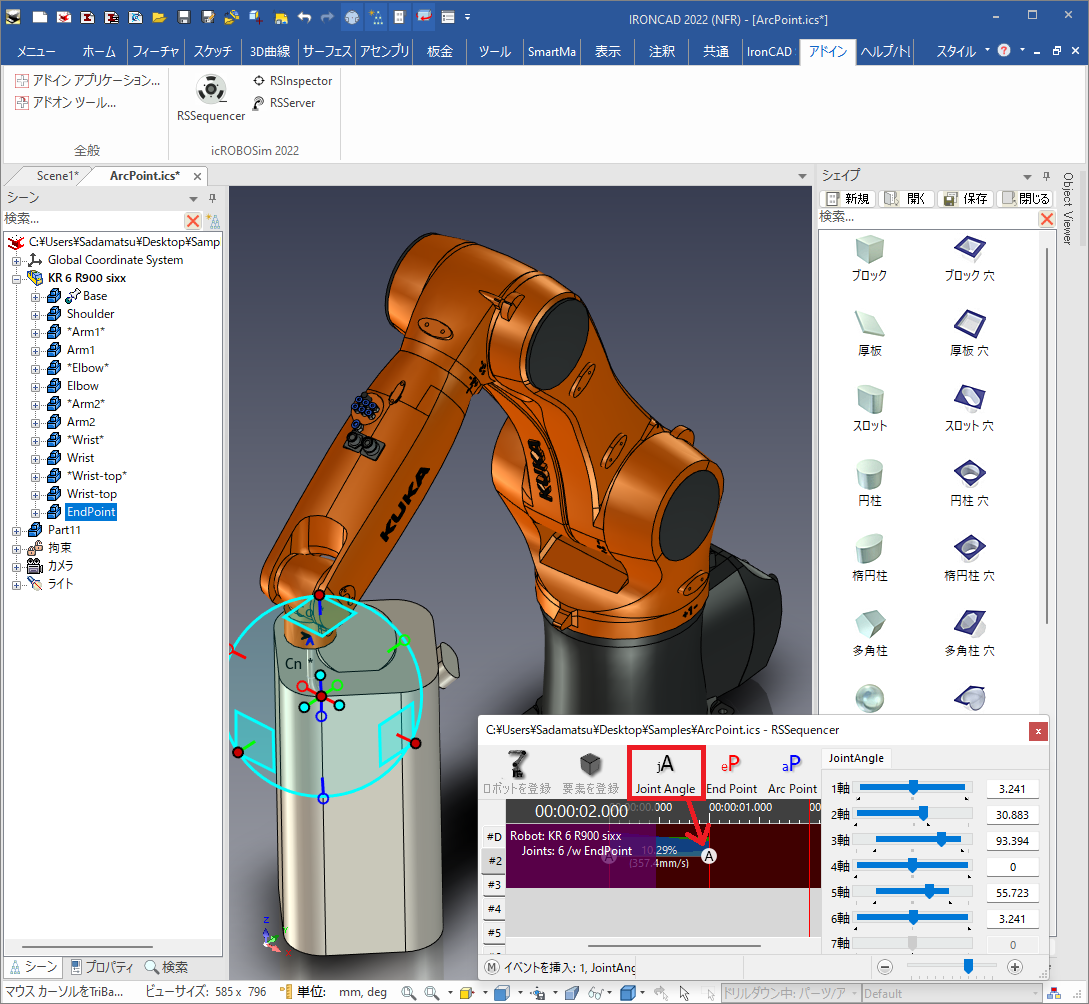
RSSequencer画面 のライムラインの1秒地点に "A" が作成されます。
〔3〕2点目 に移動し、再度 [Joint Angle] をクリックします。
ライムラインの 2 秒地点に "A" が作成されます。
手順3. 動作を確認する
〔1〕RSSequencer画面を伸ばし、登録したイベント全体が見えるように調整します。
〔2〕手順2 で登録した 1 秒~ 2 秒の区間を赤いタイムラインを動かします。
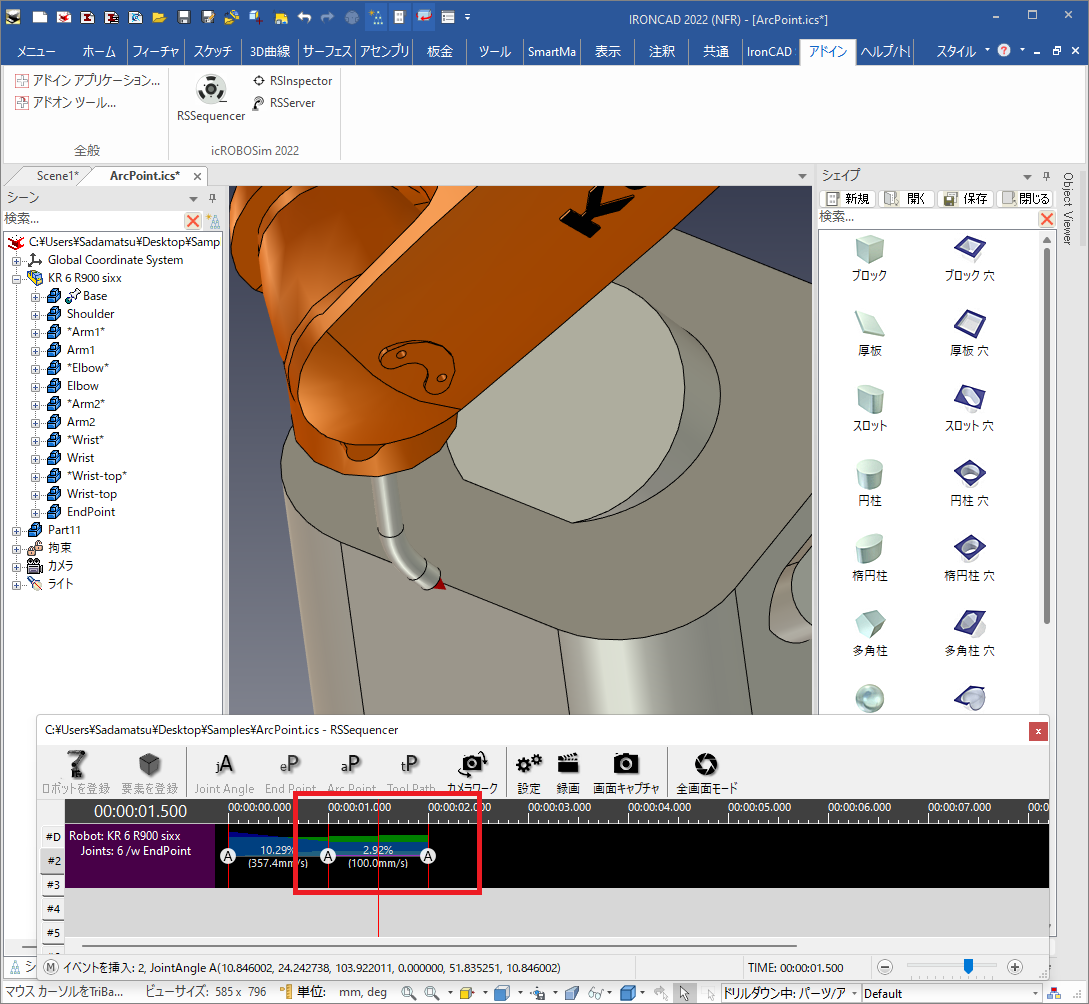
〔3〕先端ハンド部の動きを確認します。
動作の途中で、トーチ先端部はブロックパーツのエッジに沿わず、緩やかな円弧を描きます。
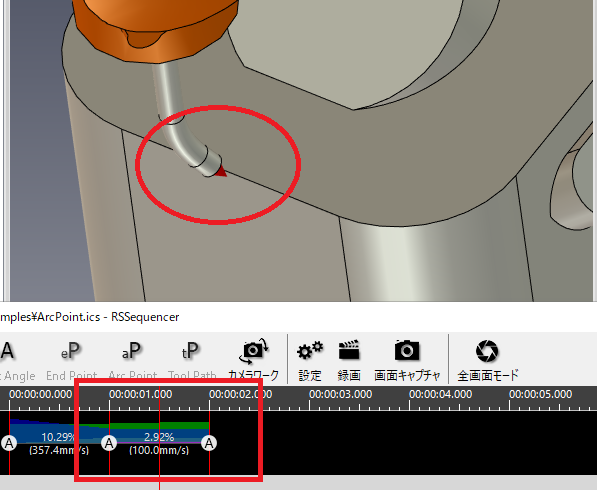
始点 → 終点までの途中の軌跡はロボット任せの姿勢となります。
-
各イベント登録する位置の姿勢(ハンドの角度や方向)は、都度 TriBall で調整してください。