XYテーブルを動かす方法
本項では、icROBOSim で XYテーブル の動作シミュレーションを作成する方法について説明します。
icTROBOSim では、ロボット以外に装置・治具のリンク機構やシリンダーの動作をシミュレーションすることができます。
条件:
※サンプルデータで練習してみましょう。
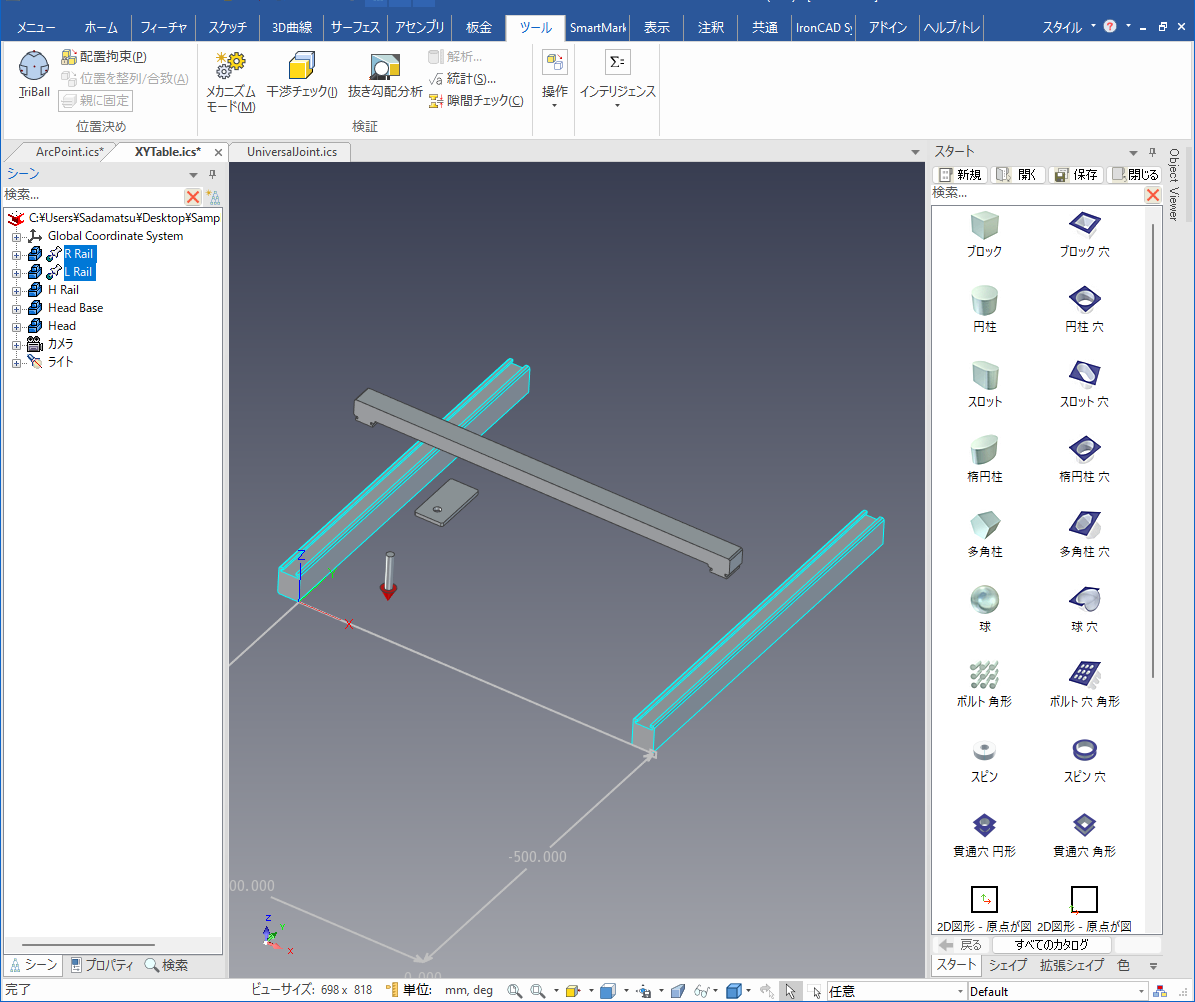
Samplesフォルダから「XYTable.ics」を開きます。
拘束を付与する
手順1 ベースレールを固定する
「R Rail」と「L Rail」を親に固定します。
手順 2 前後スライドバーを拘束する
「H Rail」を固定したベースレールにスライドするよう拘束します。
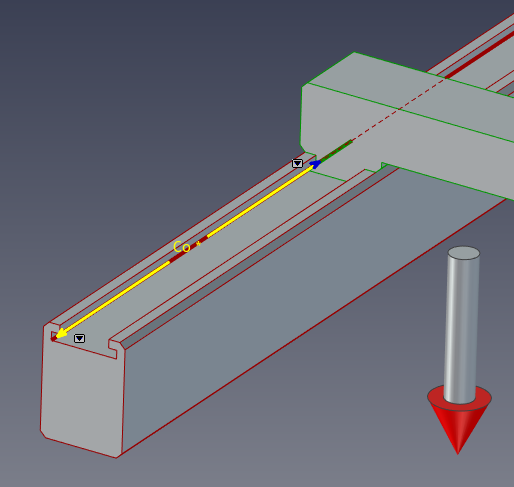
〔1〕「H Rail」と「R Rail」の接するエッジを[同心]拘束します。
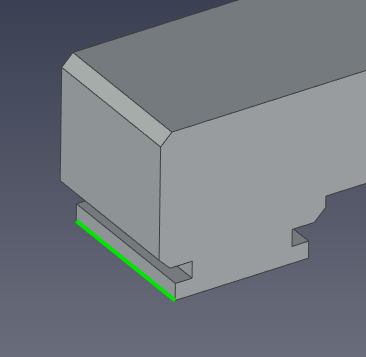
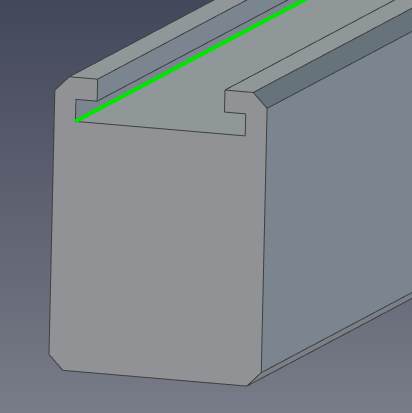
拘束すると以下のようになります。
〔2〕接する面を [合致]拘束 します。
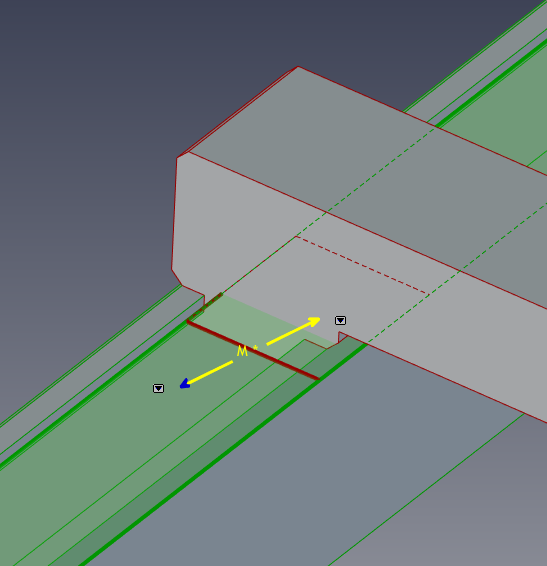
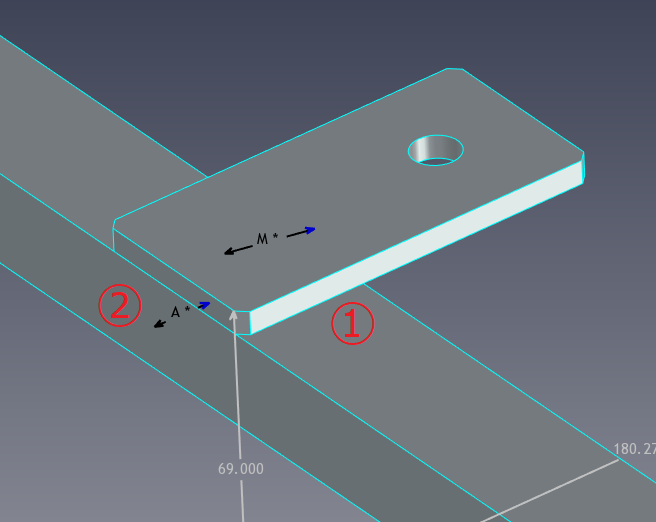
〔3〕[Head Base] と「H Rail」を拘束します。
①合致拘束 ②整列拘束
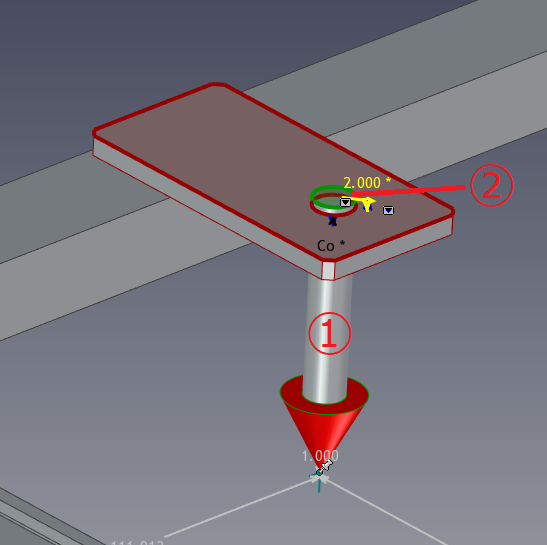
〔4〕[Head] と「Head Base」を拘束します。
①同心拘束 ②距離拘束
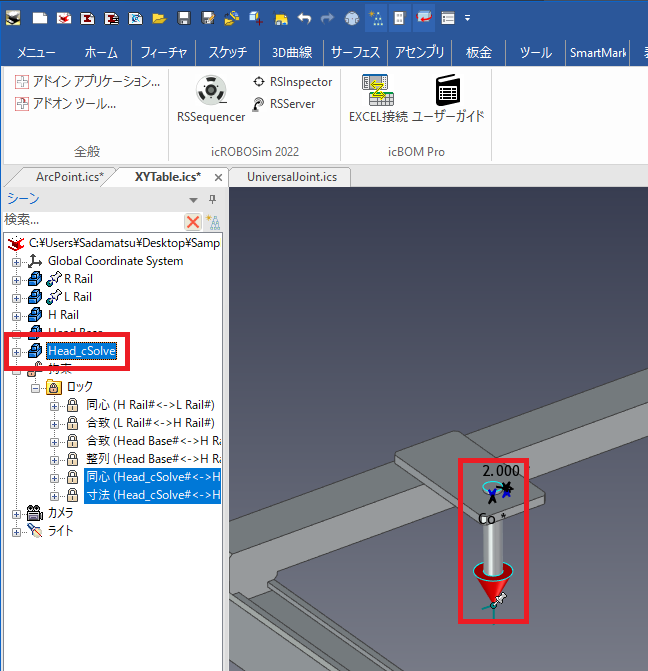
手順 3 登録する要素のユーザー名に「cSolve」を追加する
[Head]のユーザー名の最後に「_cSolve」を追加します。
-
cSolve は大文字・小文字は完全一致で付与してください。
最初の_(アンダースコア)は、半角スペースやカッコで囲む方法でも機能します。
手順 4 動作を確認する
RSSequencer を開き、[[Head_cSolve] を選択し、[要素を登録] をクリックします。
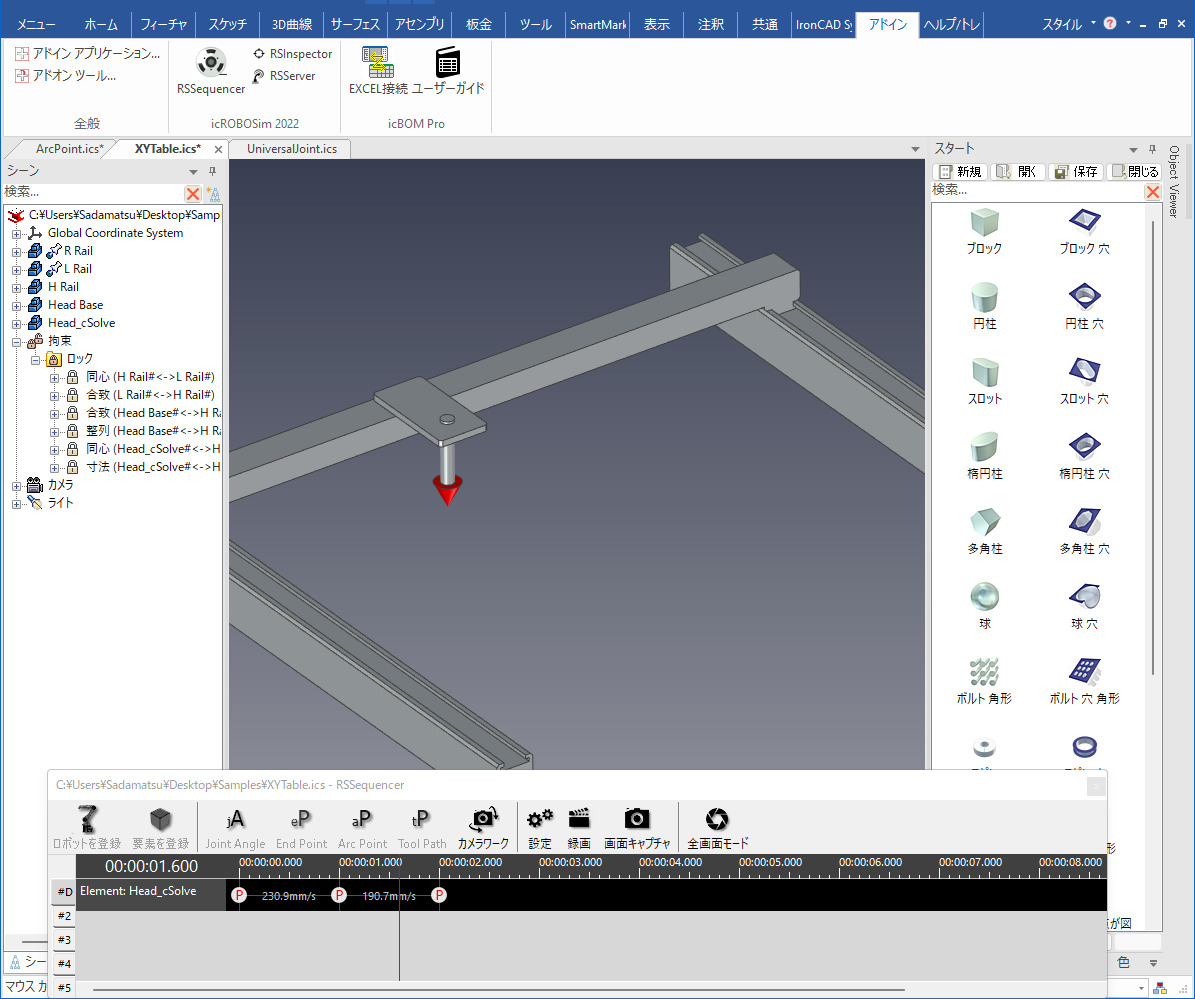
要素は [End Point] と [Arc Point] で動作を登録することが可能です。
TriBall で位置を移動し、動作を確認してください。
-
ユーザー名から「_cSolve」を削除すると、シミュレーションのタイムラインを動かした際に先端だけが動きますのでご注意ください。