ワーク座標の設定
実際のロボットと同じくワーク座標に相当する基準を決めます。
icROBOSim では、ロボットアセンブリのアンカーが、ワーク座標に相当します。
ロボットに作業させるワーク・治具データを配置後に、ワーク座標を設定できる段階になってから実施してください。
ここでは、弊社が実施した実際の事例をもとに説明します。
シール塗布シミュレーション
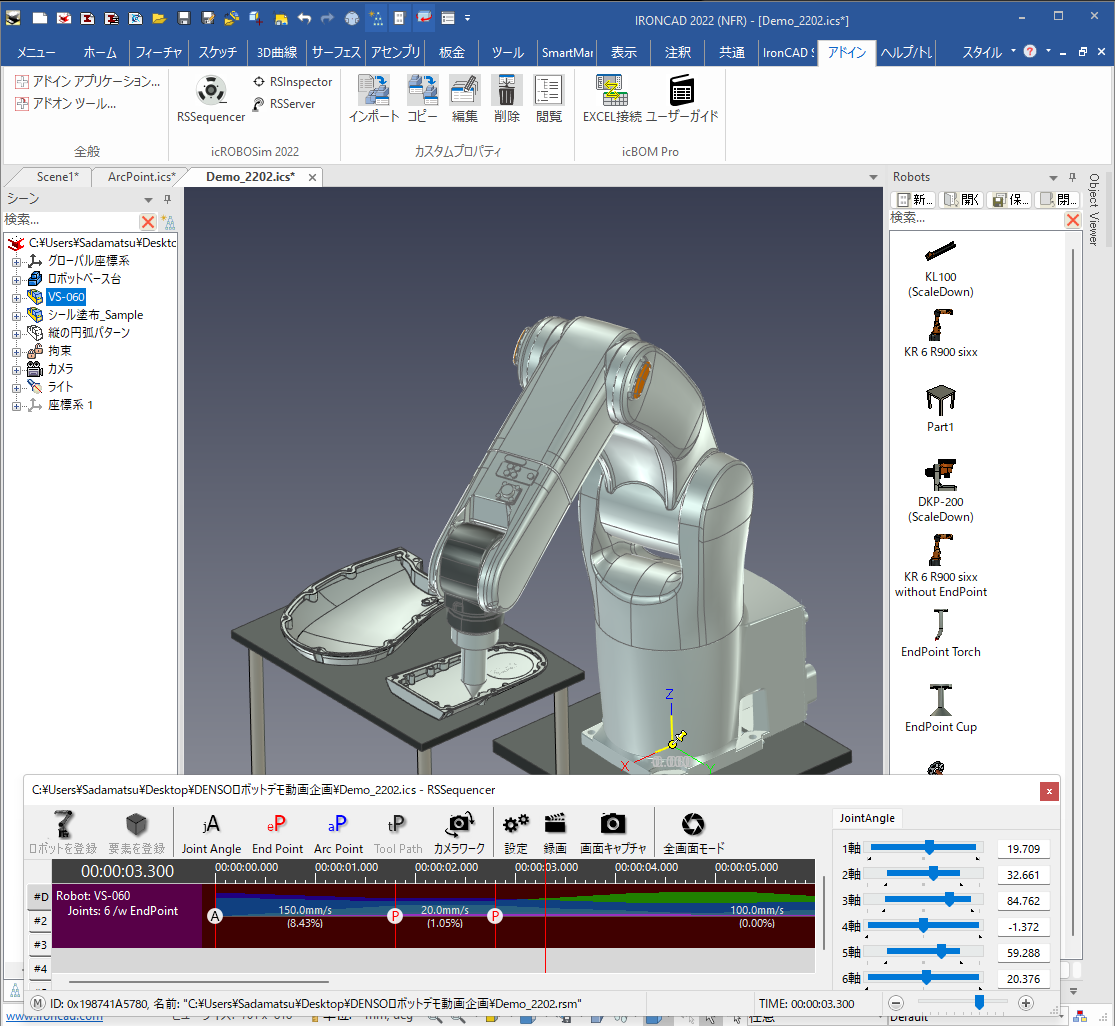
手順1. シミュレーションを作成する
RSSequencer でシミュレーションを作成します。
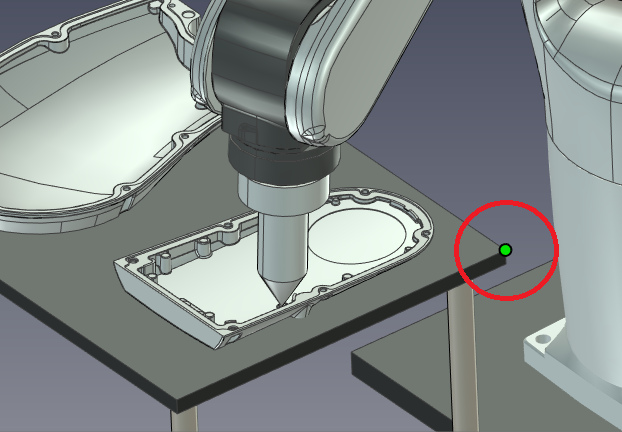
手順2. ワークに対する基準位置を考える
通常、ワークの位置はロボットの設置位置からではなく、ワークが置かれた台を基準を配置されます。
ロボットハンド部はワークの位置を正確に割り出すため、台に設定した基準(ワーク座標)から座標を取得することでより正確に位置が決まります。
ここでは、台の端点を基準(ワーク座標)と考えます。

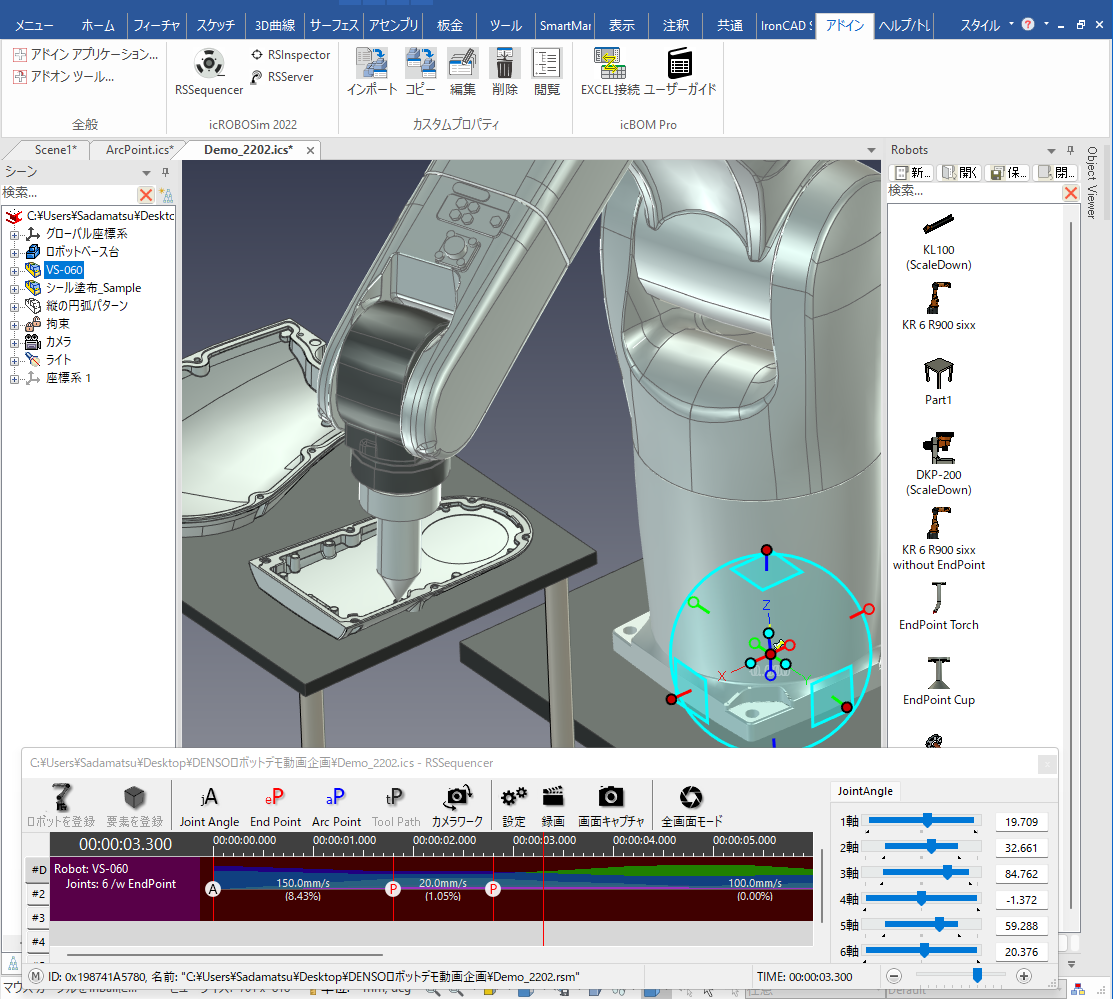
手順3. ロボットアセンブリのアンカーを移動する
〔1〕ロボットアセンブリのアンカーを選択し、TriBall を起動します。
〔2〕手順2 で決めた位置へ移動します。
手順4. EndPoint の座標を確認する
ロボットの先端(ハンド)部の EndPointアセンブリ を選択し、座標を確認します。
台の端点を基準に先端(ハンド)部の座標が表示されます。
このように、アンカー位置を変更すると、表示する座標が変わります。
ロボット検討では、座標は非常に重要な設定となります。
- RSSequencer でシミュレーション作成後でも移動(設定)可能
- Lv.2 以降をご利用でコード出力する場合は、本設定により出力される結果が変わります。