コンテンツにスキップ
icROBOSim ユーザーガイド
7軸ロボットをサポート
検索を初期化
HOME
セットアップ
基本操作
機能1(基本)
機能2(応用)
有償機能
事例集
トレーニング
新機能
トラブルシューティング
FAQs
icROBOSim ユーザーガイド
HOME
セットアップ
セットアップ
icROBOSim の動作環境
事前準備
シリアル番号の申請
インストール
ライセンス認証
ライセンス認証
インターネット経由で認証
インターネットに接続できない場合
icROBOSim を有効化
アンインストール
ライセンスの解除/移行
ロボットライブラリ
シリアル番号の確認方法
基本操作
基本操作
起動と終了
操作画面
設定
ロボットの動作定義
ロボットの動作定義
サンプルカタログ/データ
ロボットの配置
先端部(ハンド)の設定
ワーク座標の設定
動作イベント
動作イベント
Joint Angle
End Point
Arc Point
Tool Path
Tool Path
Tool Path (エッジ指定)
Tool Path (面指定)
Tool Path (点指定)
要素の動作定義
要素の動作定義
要素の配置
動作イベント
動作イベント
End Point
Arc Point
カメラワーク
カメラワーク
基本操作
応用1
動画とキャプチャ
機能1(基本)
機能1(基本)
登録イベントの選択
登録イベントの調整
登録イベントの調整
移動
コピー
速度による調整
ワークロードによる調整
時間スケールの調整
動作イベントの反転
トラックの順序変更
コメントの入力/削除
要素の表示/非表示
ステップ送り機能
相互ハイライト
シーケンスのエクスポート/インポート
ショートカットキー
機能2(応用)
機能2(応用)
ロボットの再配置
要素の再配置
EndPoint(先端部)の再配置
干渉チェック
XYテーブル
スイッチ機能
有償機能
有償機能
Lv.2 ロボットの icROBOSimコード出力(有償)
Lv.3 ロボットの メーカーコード出力(有償)
Lv.3 デンソーロボット リアルタイム動作(試験機能)
事例集
事例集
シール塗布
パレタイジング
ピッキング
スポット溶接
ワークを掴む動作
トレーニング
トレーニング
コンベア上のワーク動作
エアシリンダーを使用した動作
6 軸ロボットによるピック & プレース動作
新機能
新機能
ツールパスにRZ回転の抑制/非抑制を切り替える機能を追加
登録した要素の上下順番をダイレクトに変更
(Lv.3)デンソースカラロボットのコード出力をサポート
7軸ロボットをサポート
Lv.3 コード出力で Windows11 をサポート
全画面モードの改善
RSSequencer から登録ロボットを削除すると IRONCADが落ちる現象を改善
Lv.3 bcat 接続機能
トラブルシューティング
トラブルシューティング
お問い合わせ先
先端(ハンド)部がロボットから離れる
RSSever に[Socket Error]が表示される
インストールができない
RSSequencer が起動できない
FlushPackets のメッセージが表示される場合
登録したデータが動かない
拘束条件に沿った動きをしない
動かした要素の向きがおかしくなる
FAQs
FAQs
FAQs
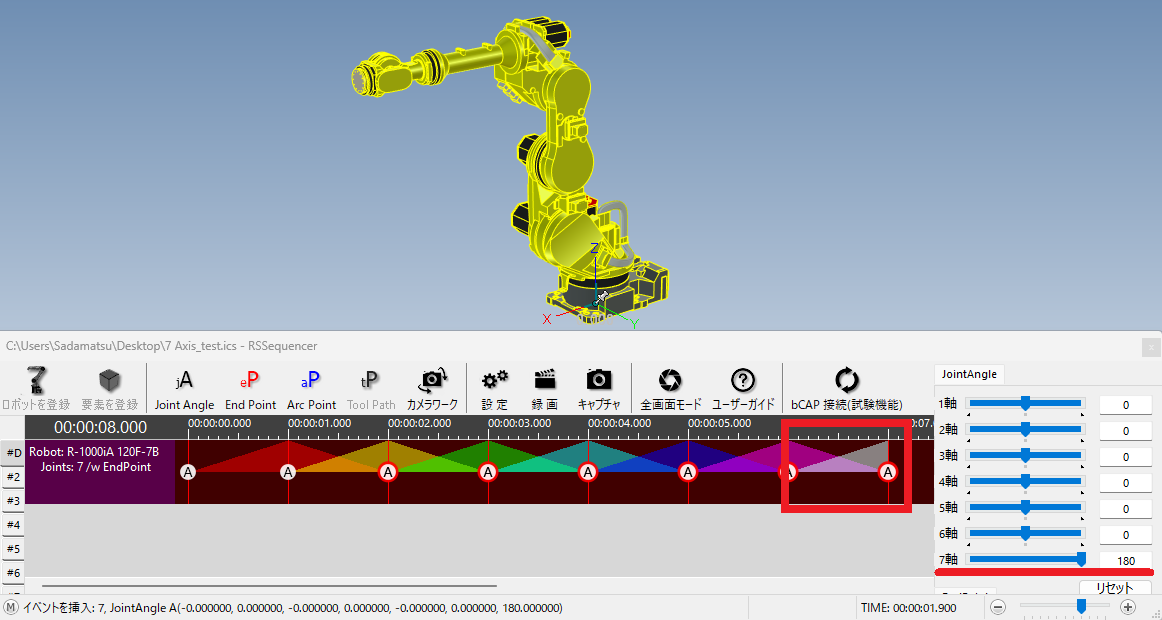
7軸ロボットをサポート
新たに7軸ロボットをサポートし、7軸目のカラー表示を追加しました。
ページトップへ戻る