End Point (直線動作)
本項目では [End Point] の動作イベント について説明します。
End Point は、"ロボット" と"要素"の両方に指定可能なイベントです。
要素の動作は基本的に TriBall を使用して作成します。
End Point で登録した場合、始点から目標点を結ぶ直線を移動できます。
手順1. 要素データを準備する
参照:要素の配置
手順2. 位置を登録する
〔1〕ブロックパーツを選択し、TriBall を起動します。
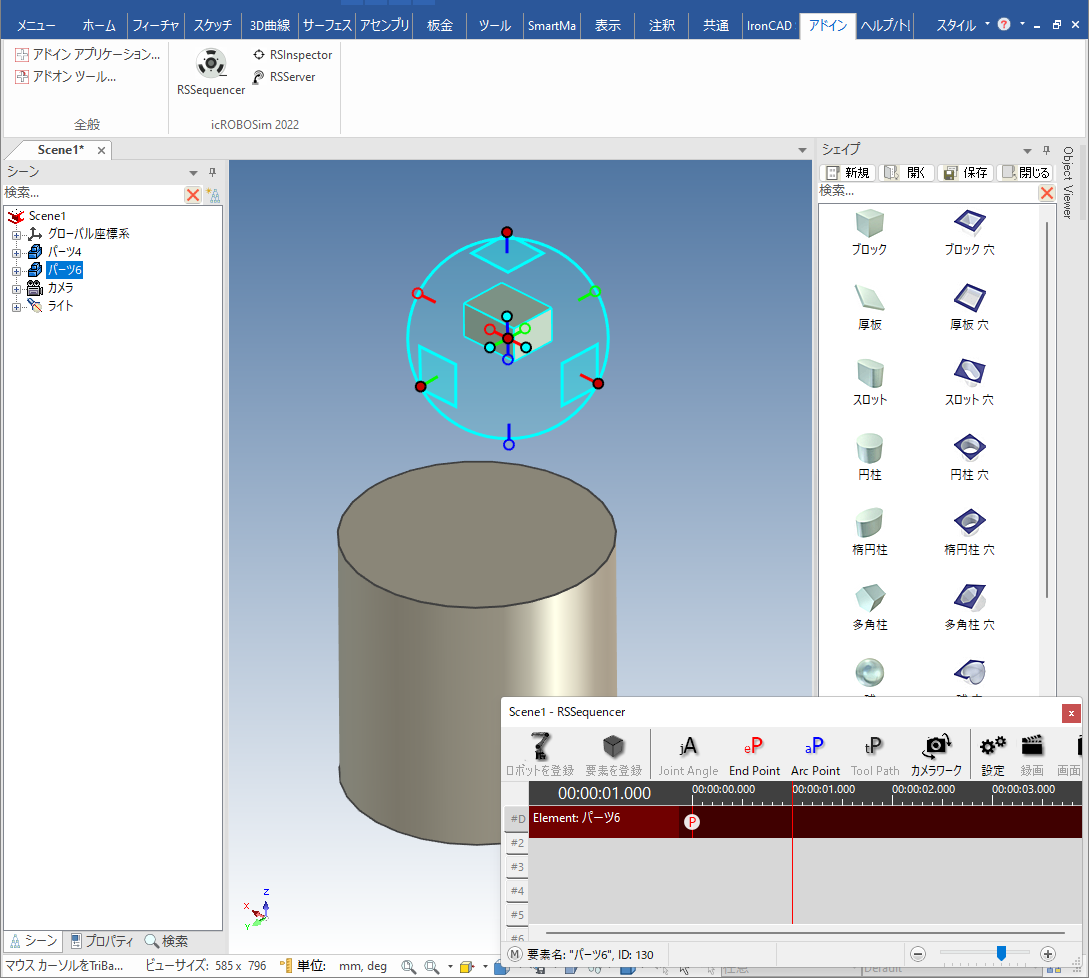
〔2〕始点へ移動し、[End Point] をクリックします。
※ブロックに対して TriBall を変更する場合は、スペースキーで移動します。(IRONCADの操作)
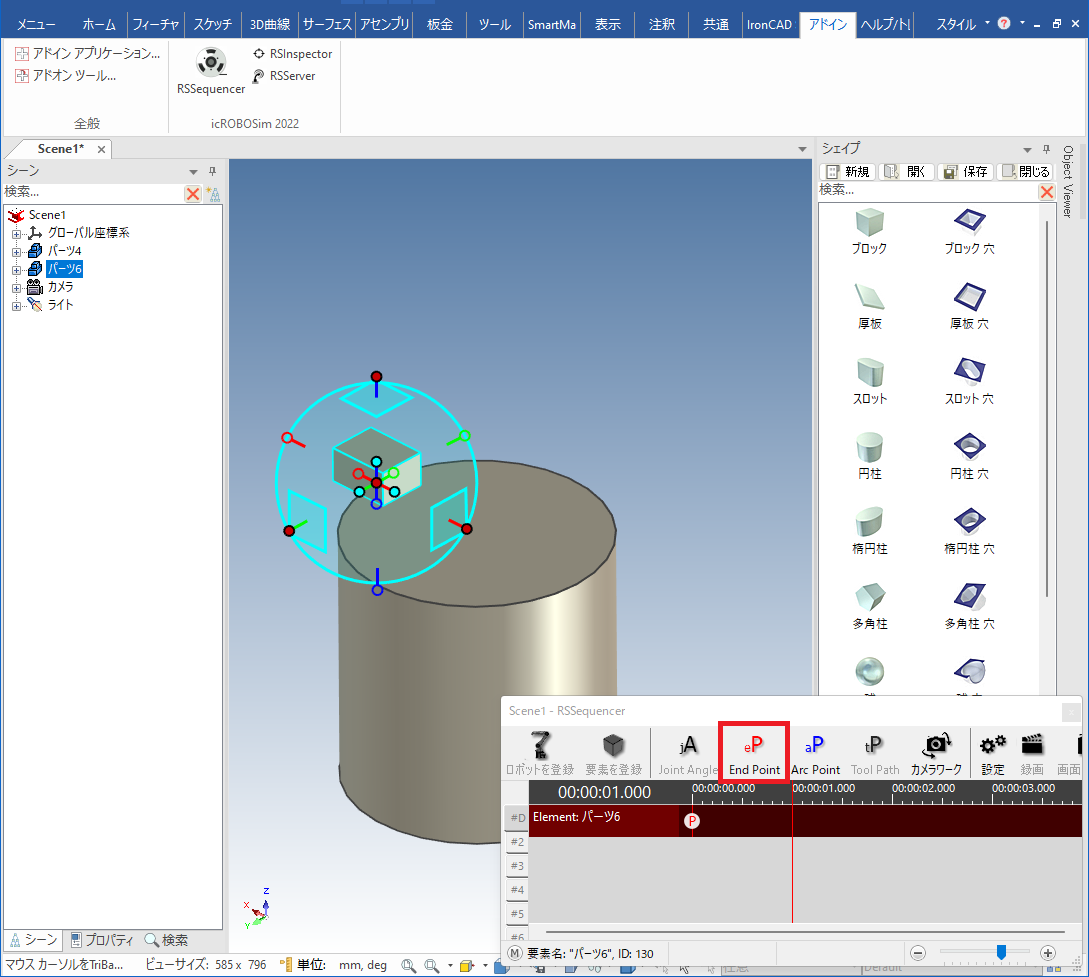
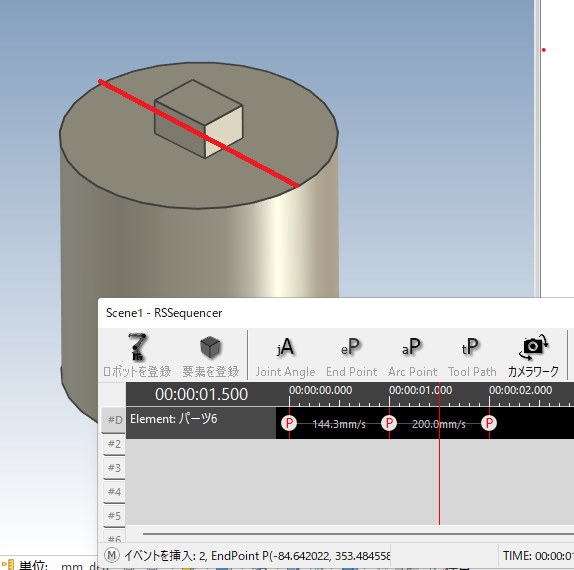
タイムラインの 1 秒地点に赤い "P" が作成されます。
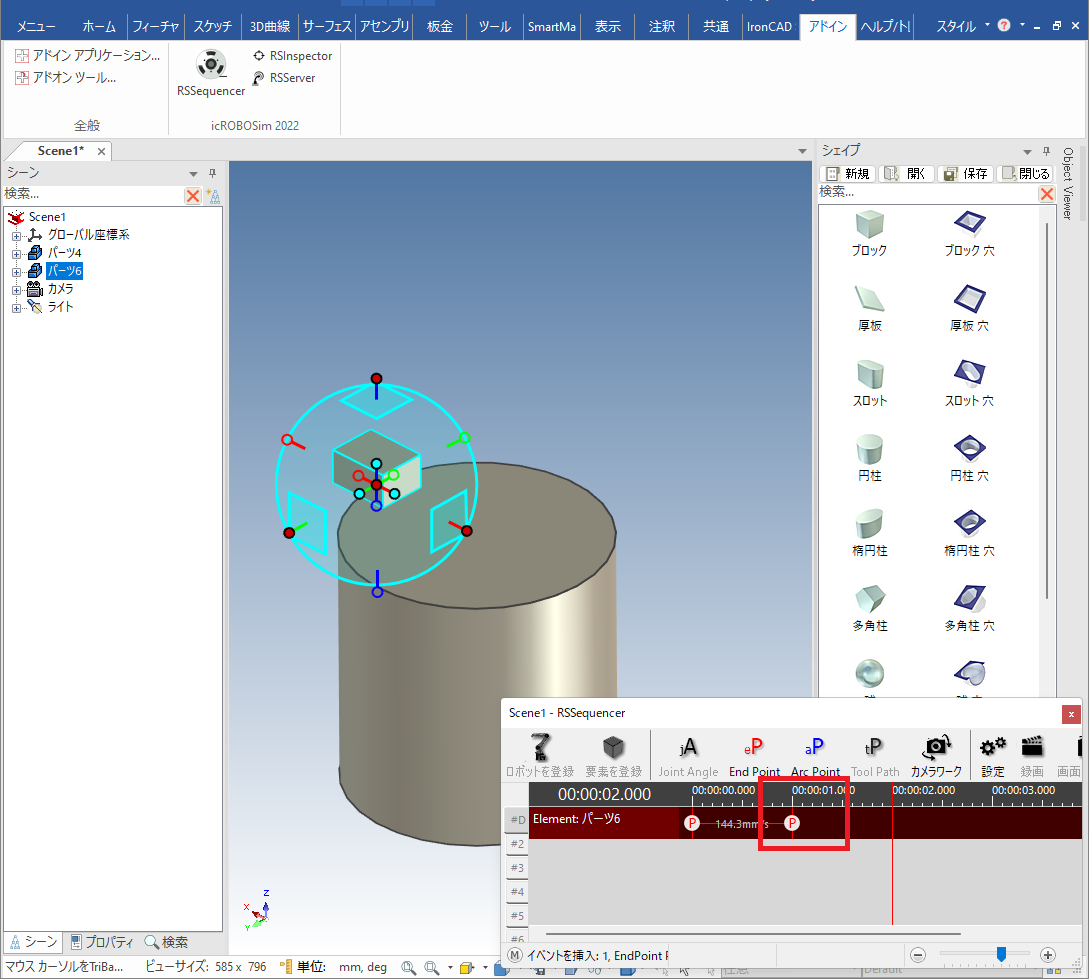
〔3〕目標点(終点)へ移動し、[End Point] をクリックします。
タイムラインの 2 秒地点に赤い "P" が作成されます。
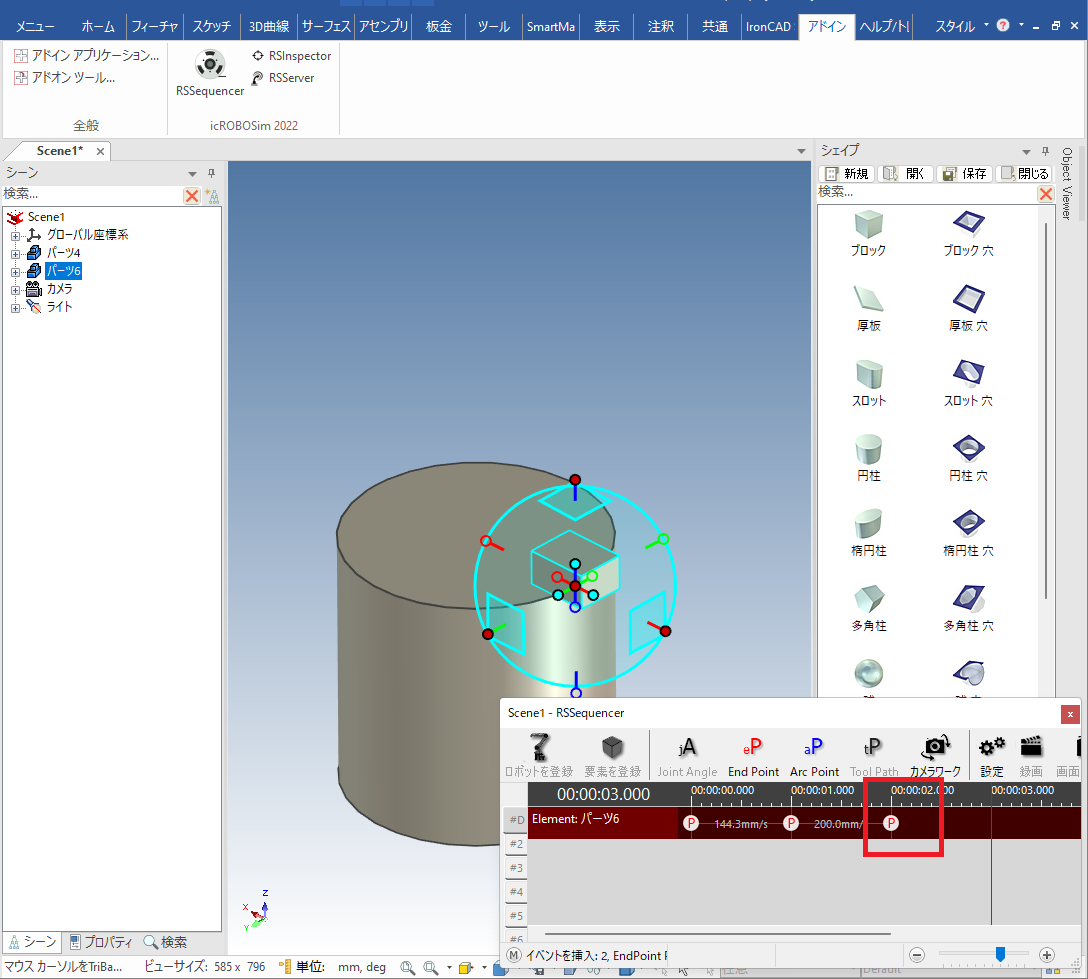
手順3. 動作を確認する
〔1〕RSSequencer画面 を伸ばし、登録したイベント全体が見えるように調整します。
〔2〕手順2 で登録した 1 秒~ 2 秒の区間を赤いタイムラインを動かします。

〔3〕ブロックパーツの動きを確認します。
始点と終点を結ぶ直線上を移動します。
-
イベント登録した後に、ブロックのアンカー位置を変更すると、シミュレーション全体の位置が変更分オフセットされます。