シーケンスのエクスポート/インポート
本項では、作成した動作シーケンスを別のシミュレーションにコピーする方法を説明します。
同じロボットデータや要素データを流用して使用し、シミュレーションの動きも流用する場合に使用します。
同じデータどうしの場合に適用可能です。異なるデータに動作をインポートする場合、エラーが表示されます。もしインポートできた場合も元の同じ動きを保証できません。
シーケンスのエクスポート
〔1〕登録したロボットまたは要素名を右クリックし、[シーケンスをエクスポート] をクリックします。

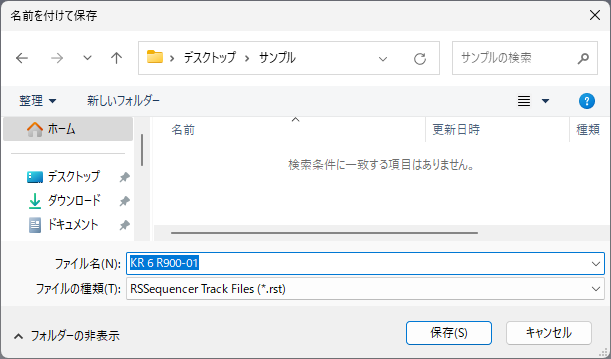
〔2〕任意の場所と名前を設定し、[保存]します。
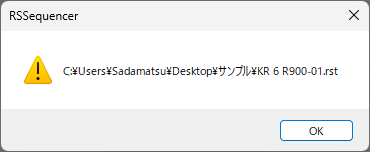
〔3〕保存されるファイルのメッセージが表示され、[OK] をクリックします。
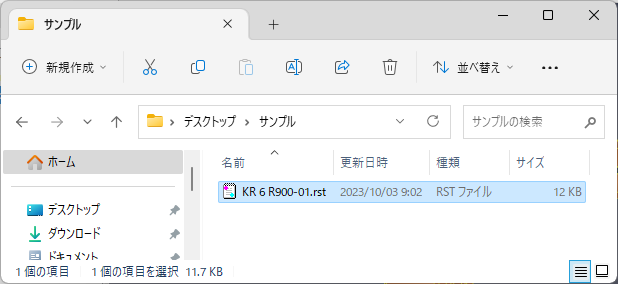
〔4〕保存されたファイルを確認して完了です。
シーケンスのインポート
〔1〕別のシミュレーションに同じロボットデータを [ロボットを登録]します。
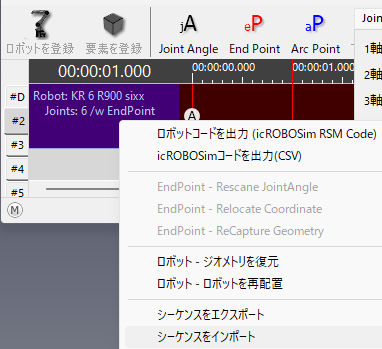
〔2〕登録したロボットまたは要素名を右クリックし、[シーケンスをインポート] をクリックします。
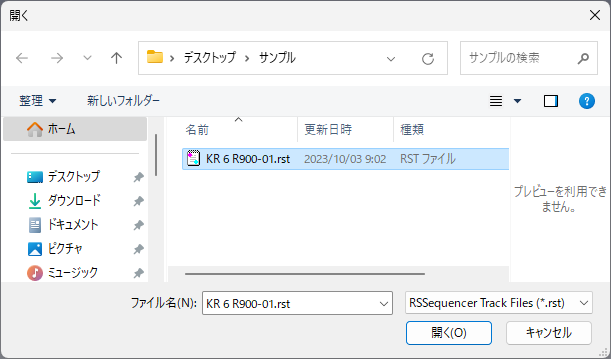
〔3〕予めエクスポートしていた <.rsm> ファイルを選択し、[開く] をクリックします。
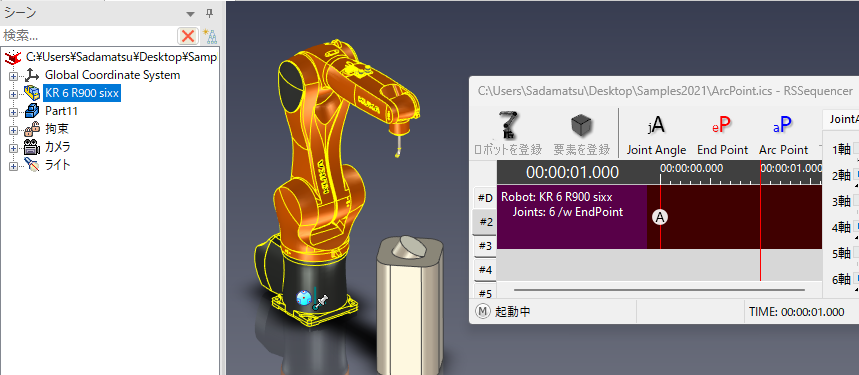
〔4〕動作イベントが正常にインポートされていることを確認します。
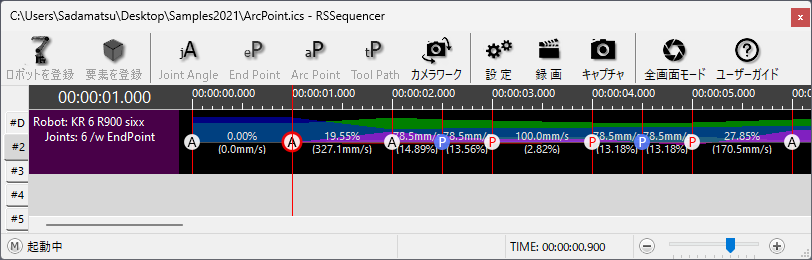
- コピーされるイベントの場所は、RSSequencer の赤いタイムラインの位置から始まります。
- シーケンスの流用は異なる icsファイル間 でも可能です。 ただし、同じロボットデータ(機種)を使用した場合に限ります。