Tool Path (エッジ指定)
2025新機能
本項目では [Tool Path] (エッジ指定)の動作イベント について説明します。
要素の動作は基本的に TriBall を使用し、先端(ハンド)部を移動して作成しますが、 Tool Path は開始点を指定した後にソリッド・サーフェスのエッジや面の外形線を動作パスとして指定することで、スタート地点から目標点までガイドに沿って移動することができます。
-
動作はガイドパスの選択方法や作成方法により変化します。
そのため、ツールパスを実行する前に動かしたいイメージにあったパスデータの作成が重要です。
拘束でつないだリンク機構などは、正常に ToolPath が作成できない場合があります。 その場合は従来の End Point(赤いP) や Arc Point(青いP) でシミュレーションを作成してください。
スタート位置の姿勢を固定して動かす場合
手順1. パスデータを作成する
[1] スケッチを準備します。
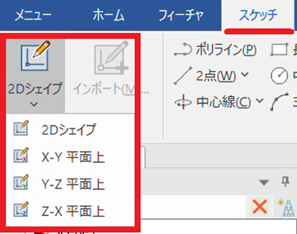
[2] 作図機能と拘束を使用し、パスのスケッチを描きます。

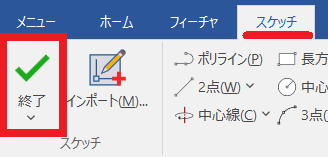
[3] 作成後に、[終了] をクリックします。
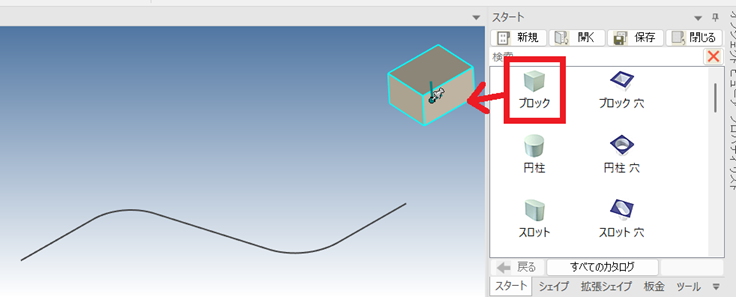
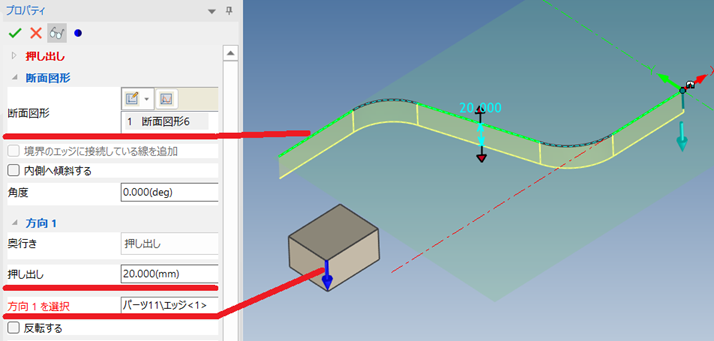
[4] 横方向に押し出すためのダミーブロックを [シェイプ]カタログから適当な場所にドラッグ&ドロップします。
[5] [サーフェス]タブ の [サーフェスを作成] をクリックします。
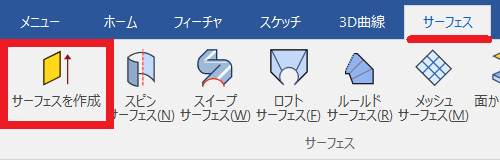
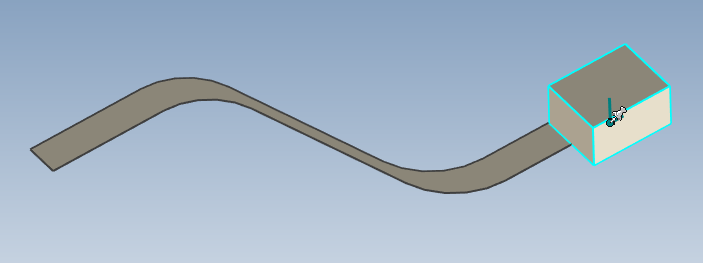
[6] サーフェスを作成します。
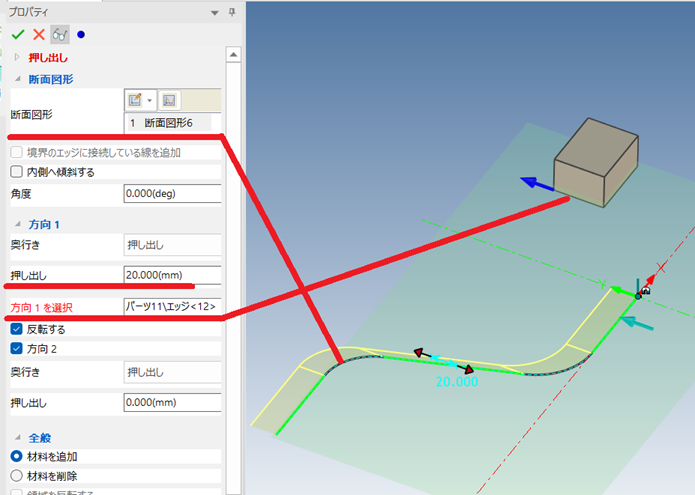
ToolPath で選択するパスは、ソリッド・サーフェスのエッジや面のみです。 3D曲線は選択できません。
手順2. 新規で要素を登録する
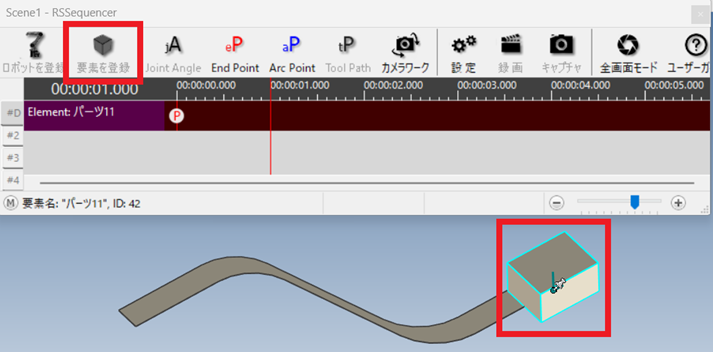
[1] 動かしたい要素をスタート位置に配置します。
[2] icROBOSim のコマンドから [RSSequencer] をクリックします。

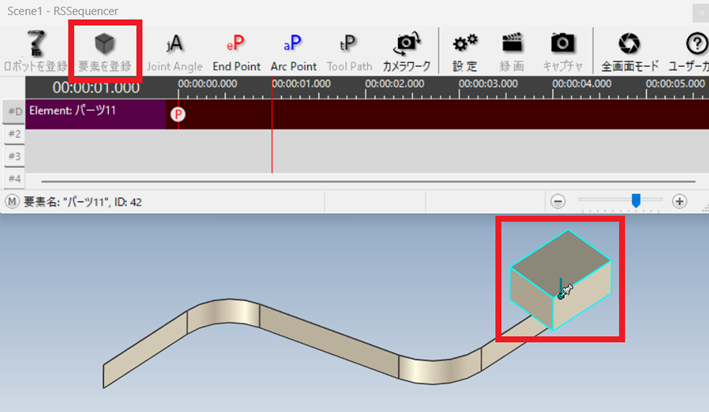
[3] 要素を選択し、[要素を登録] をクリックします。
手順3. 位置を登録する
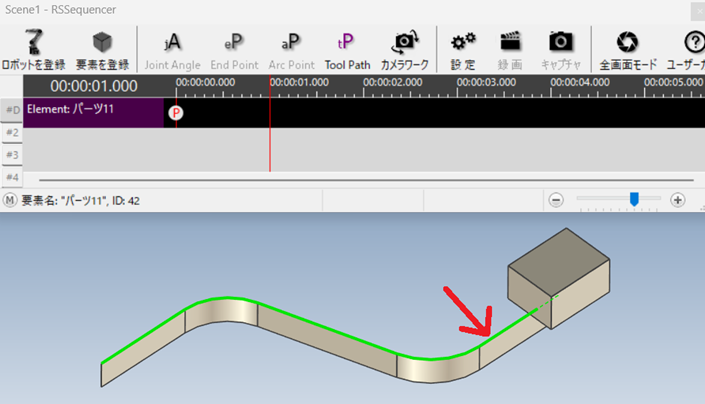
[1] 動かしたいエッジを Shiftキーを押しながら順に選択します。
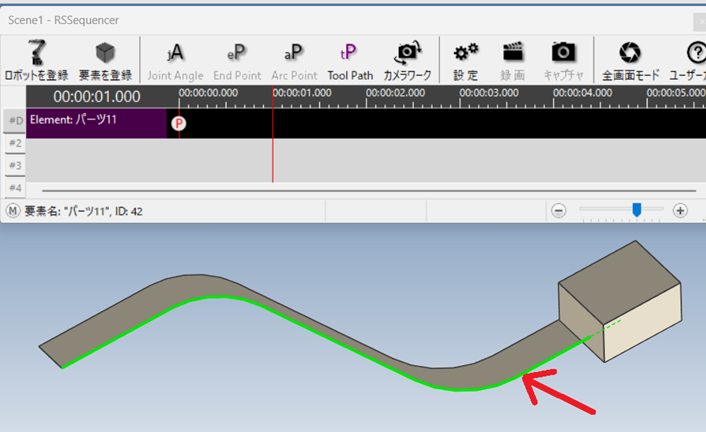
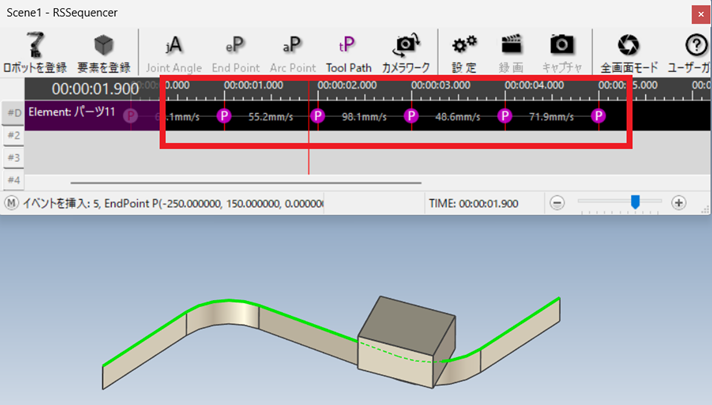
[2] [ToolPath] をクリックします。
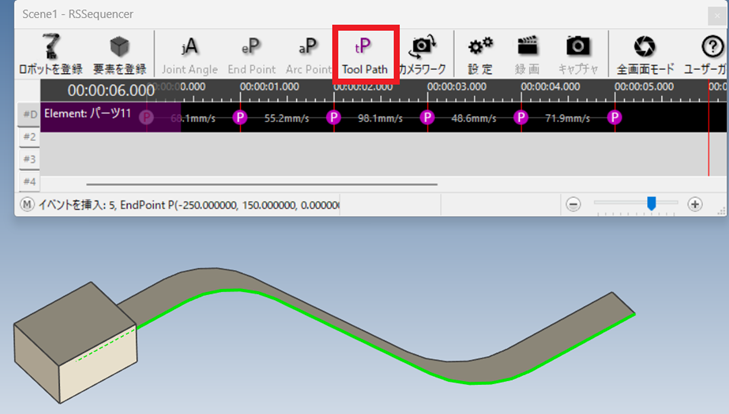
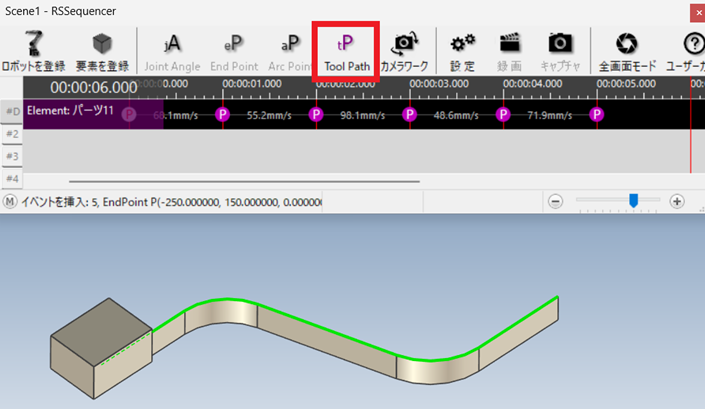
パスに沿って動作が自動作成されます。
手順4. 動作を確認する
〔1〕RSSequencer画面 を伸ばし、登録したイベント全体が見えるように調整します。
〔2〕手順3 で登録した区間の赤いタイムラインを動かします。
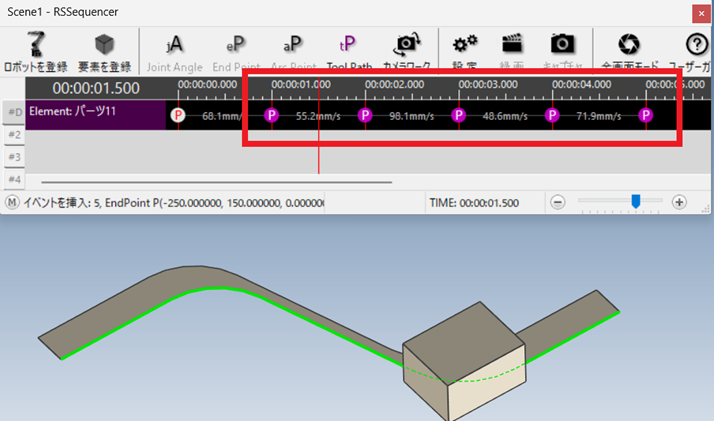
-
Tool Path の開始位置となる 赤いP(End Point) の登録姿勢を TriBall で調整してください。
その姿勢を保って動作します。
要素をパス方向に変化しながら動かす場合
手順1. パスデータを作成する
[1] スケッチを準備します。
[2] 作図機能と拘束を使用し、パスのスケッチを描きます。
[3] 作成後に、[終了] をクリックします。
[4] 横方向に押し出すためのダミーブロックを [シェイプ]カタログから適当な場所にドラッグ&ドロップします。
[5] [サーフェス]タブ の [サーフェスを作成] をクリックします。
[6] サーフェスを作成します。
手順2. 新規で要素を登録する
[1] 動かしたい要素をスタート位置に配置します。
[2] icROBOSim のコマンドから [RSSequencer] をクリックします。
[3] 要素を選択し、[要素を登録] をクリックします。
手順3. 位置を登録する
[1] 動かしたいエッジを Shiftキーを押しながら順に選択します。
[2] [ToolPath] をクリックします。
パスに沿って動作が自動作成されます。
手順4. 動作を確認する
〔1〕RSSequencer画面 を伸ばし、登録したイベント全体が見えるように調整します。
〔2〕手順3 で登録した区間の赤いタイムラインを動かします。