6 軸ロボットによるピック & プレース動作
以下より本トレーニング用データをダウンロードして、IRONCAD で開いてください。
ダウンロード:サンプルデータ
ダウンロード:サンプルデータ回答 ※以下のトレーニングを実施後の確認用
※データは IRONCAD 2022バージョン で作成されています。
動作させるデータを登録する
〔1〕[アドイン]タブ → icROBOSimグループ の [RSSequencer] をクリックします。

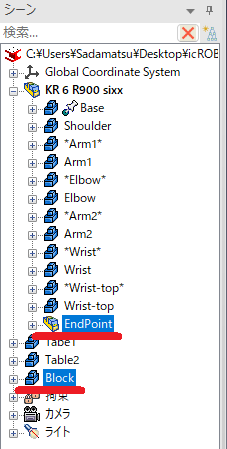
〔2〕シーンブラウザから "KR 6 R900 sixx" を選択し、[ロボットを登録] をクリックします。
RSSequencer画面 にロボットが登録されます。
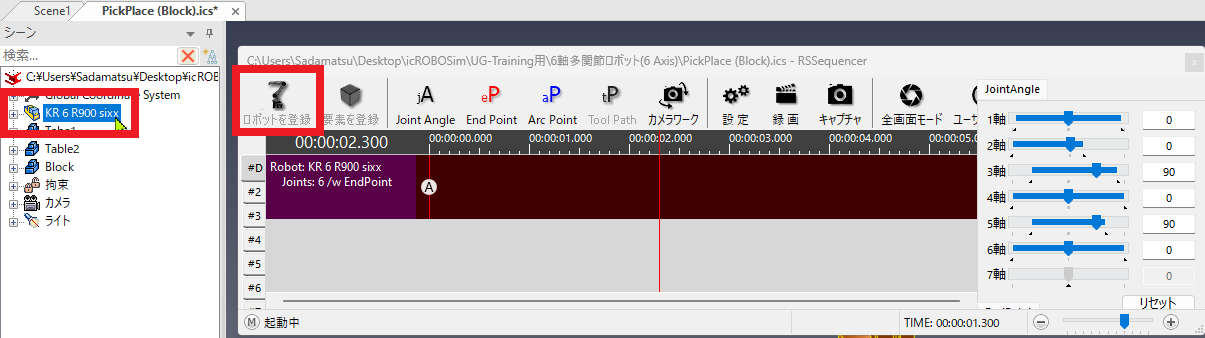
ここでは、ロボットのツール座標、ワーク座標に相当する設定を省いています。 設定する場合は、RSSequencer に登録する前に実施が必要です。 設定方法は、こちら
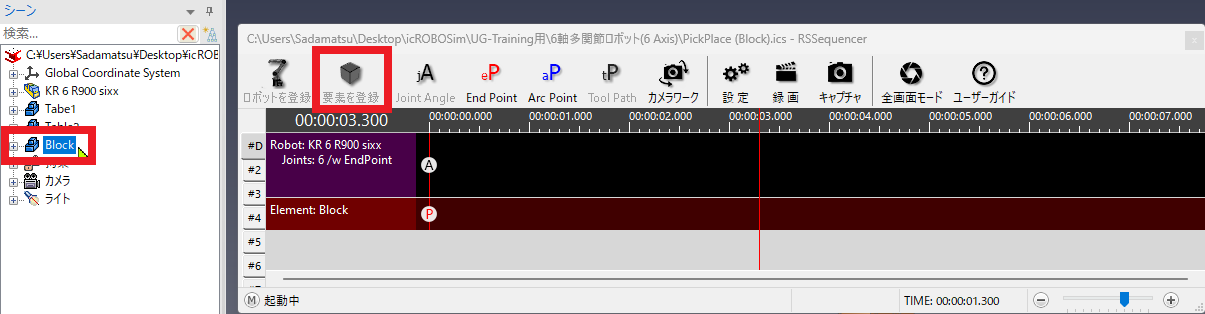
〔3〕シーンブラウザから "Block" を選択し、[要素を登録] をクリックします。
動作を作成する
ワークへのアプローチ動作を作成する
まずロボットから動作を作成します。
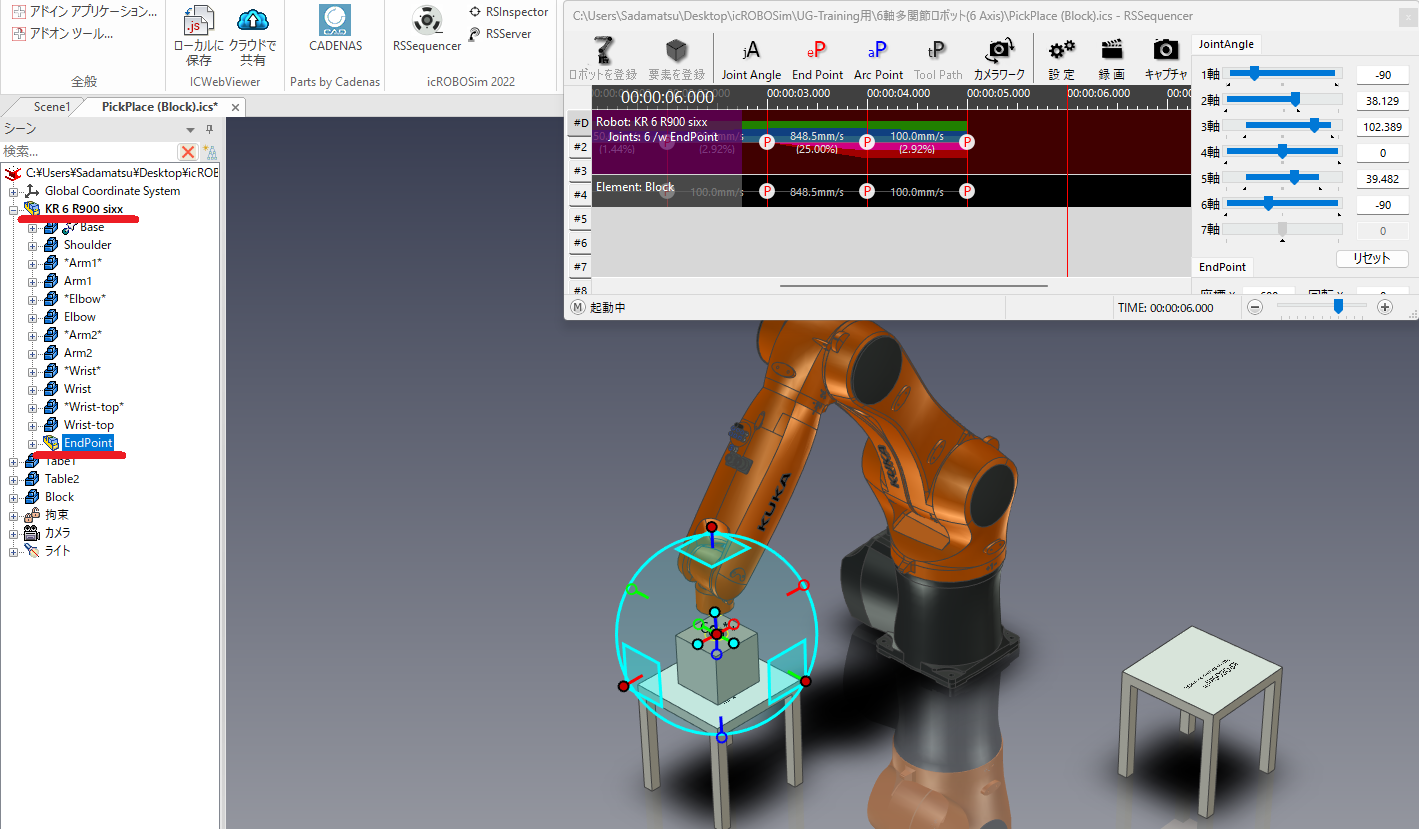
〔1〕シーンブラウザの "KR 6 R900 sixx" アセンブリを展開し、[EndPoint] アセンブリを選択し、TriBall を起動します。
RSSequencer画面 の赤いタイムラインは、1秒に設定します。※位置は任意で可
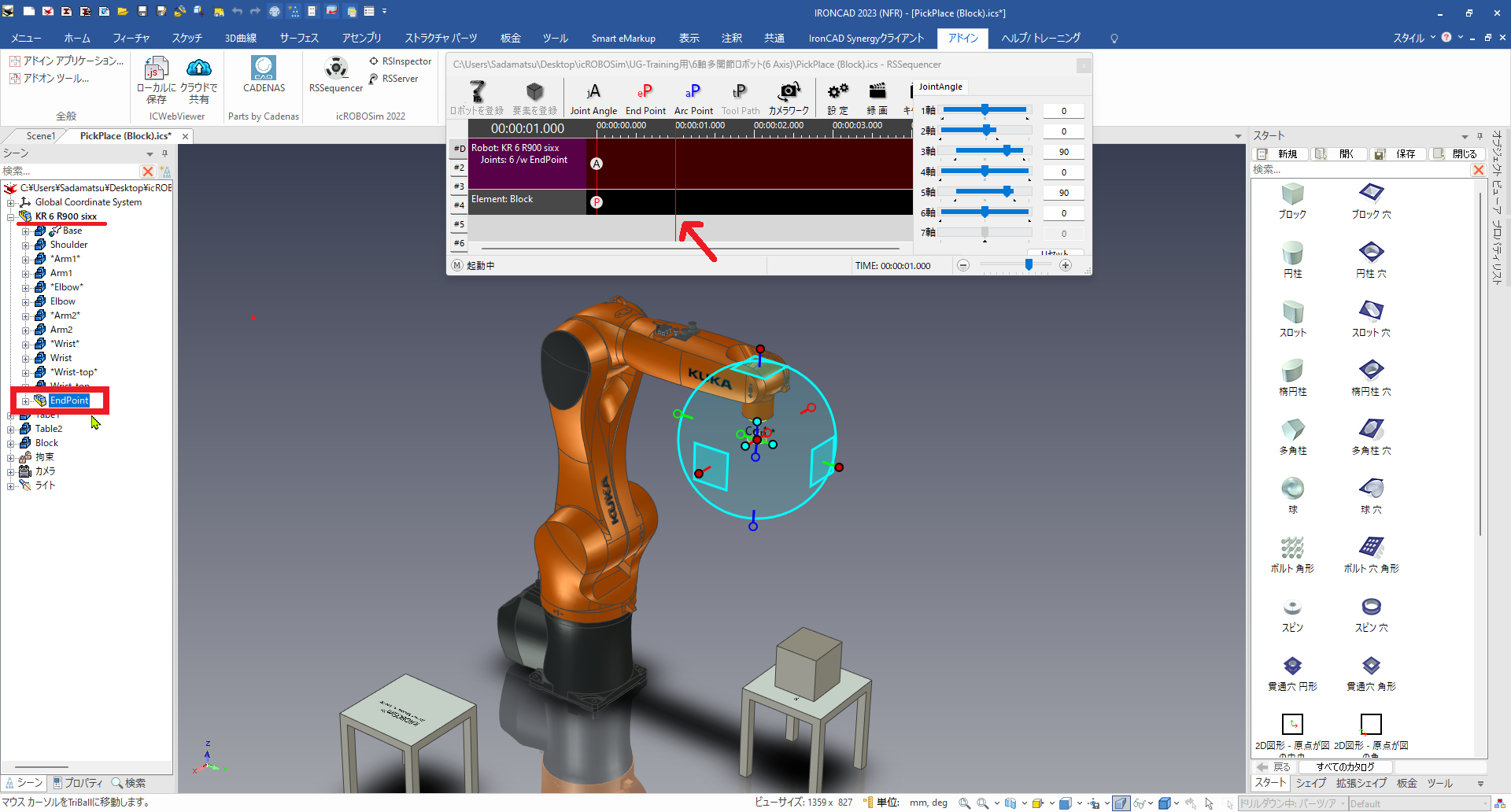
ロボットに仕事をさせる設計したハンドデータは、[EndPoint] アセンブリ内に配置して、TriBall で位置合わせします。
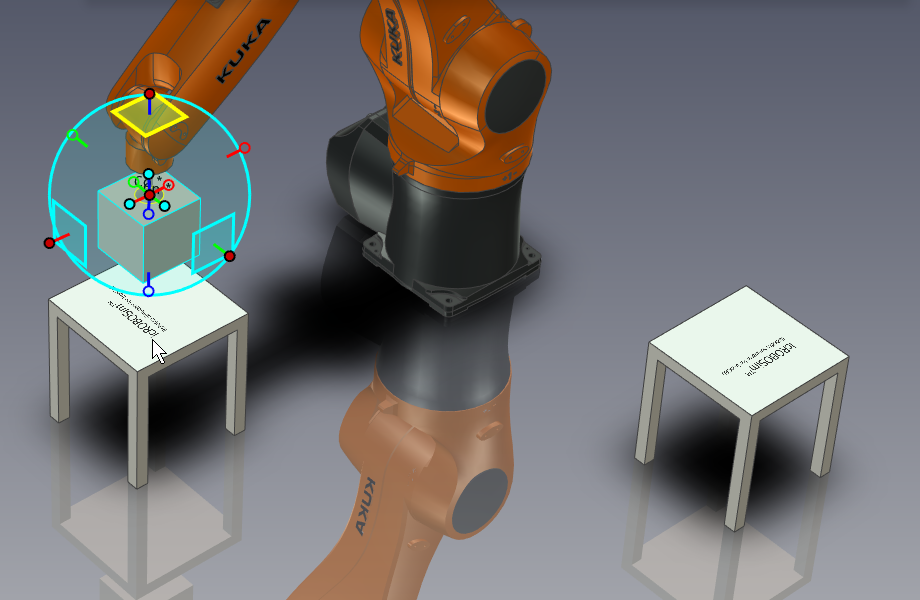
〔2〕TriBall の中心を右クリックし、[点まで] を選択します。
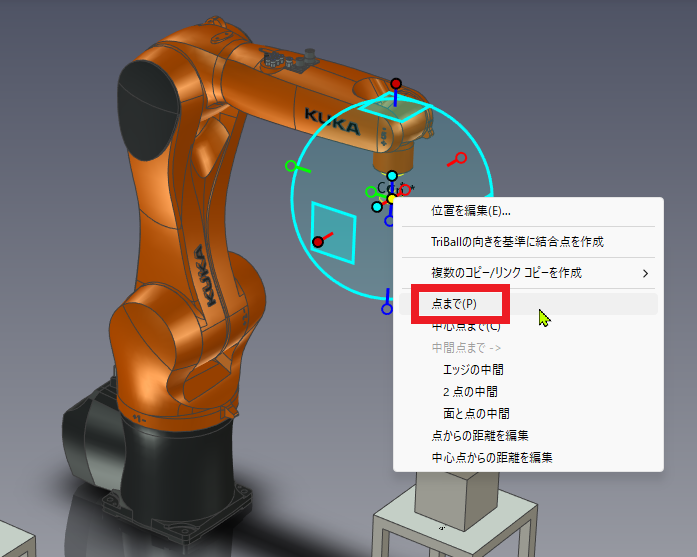
〔3〕[Block] の上面中心にマウスカーソルを合わせ、左クリックします。
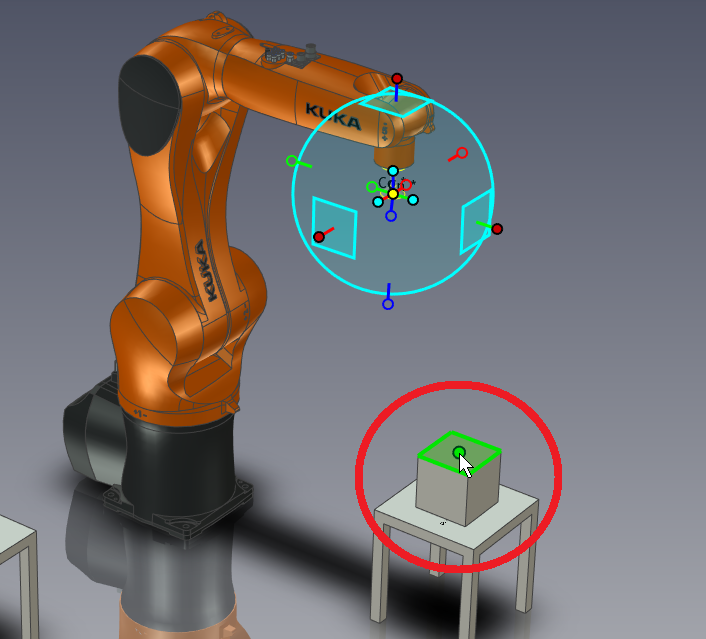
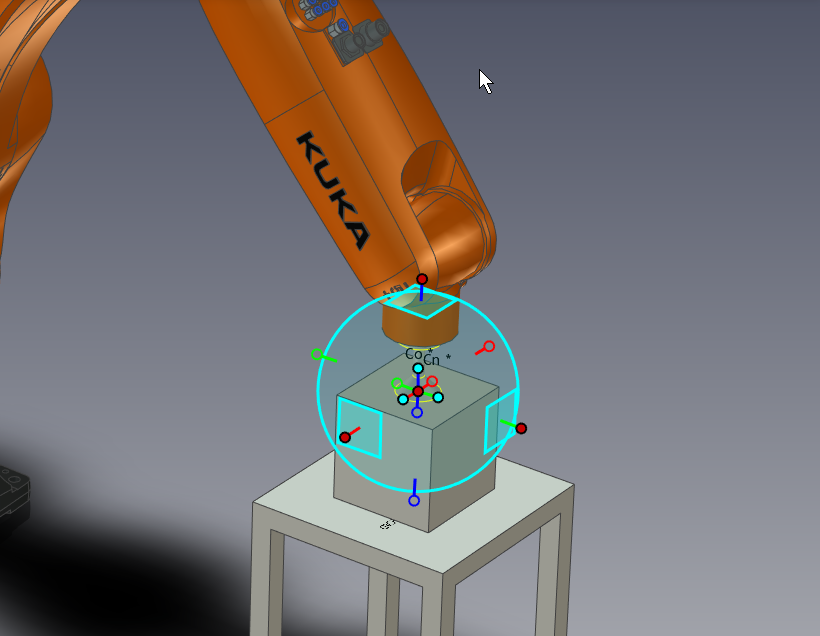
IRONCAD では、面の中心点が自動的に認識できます。 中心点が緑に光る位置で合わせます。
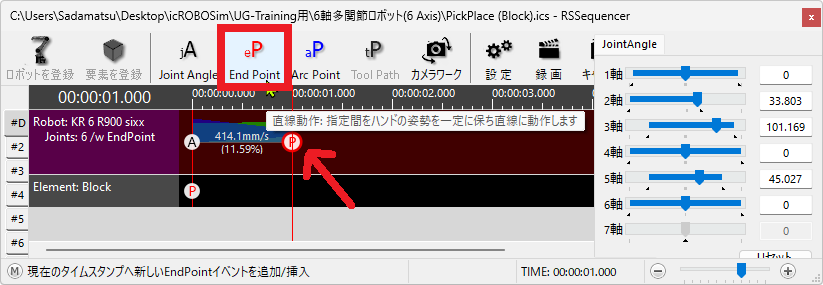
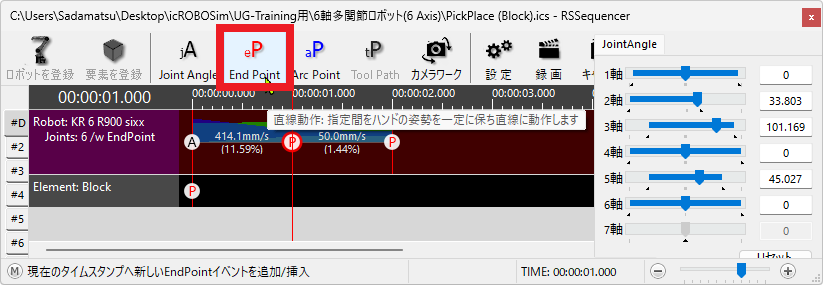
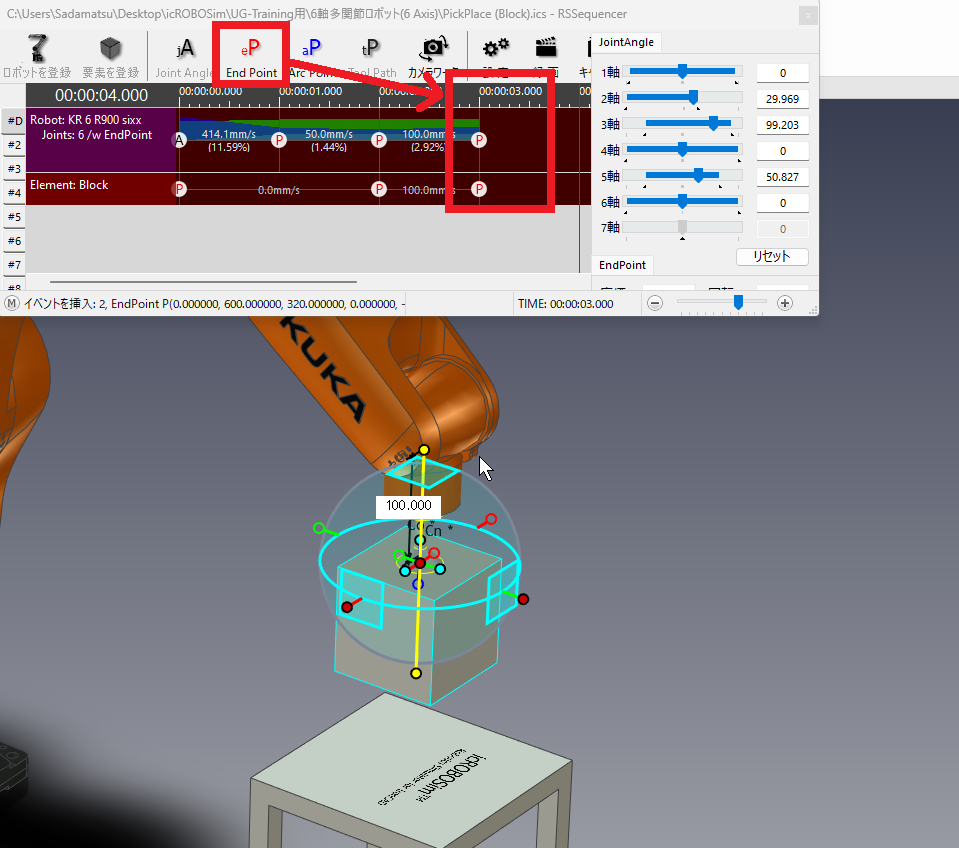
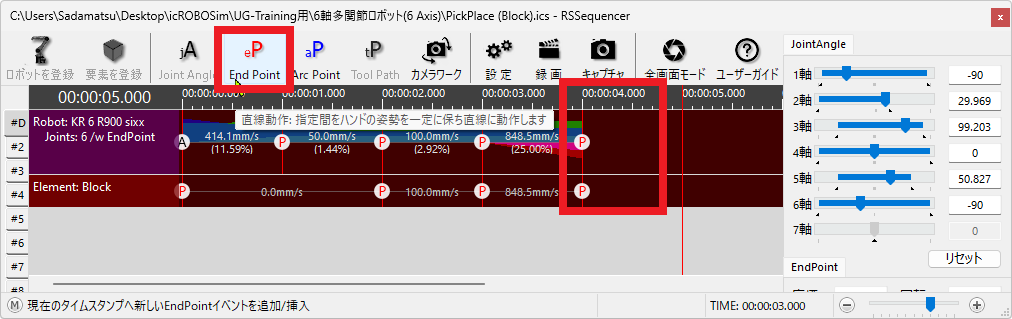
〔4〕RSSequencer画面 の[End Point] をクリックし、イベントを登録します。
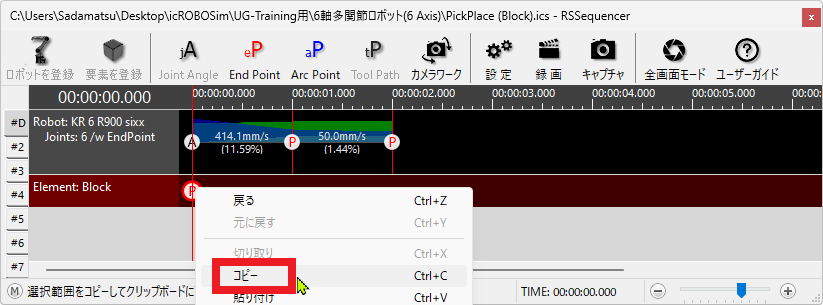
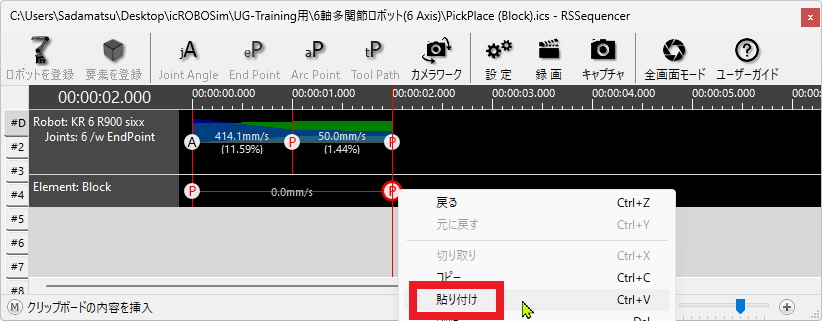
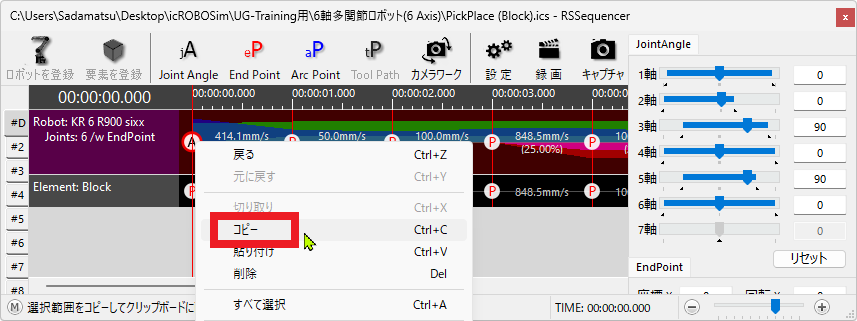
〔5〕〔4〕で作成したイベントを [コピー] し、2 秒地点に [貼り付け] します。

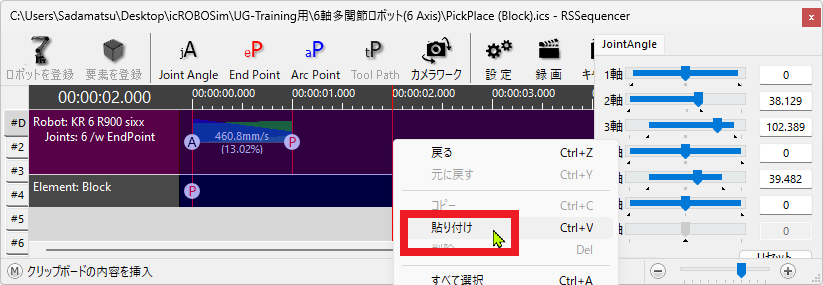
コピーは、Ctrl + c、貼り付けは、Ctrl + v の操作でも可能です。
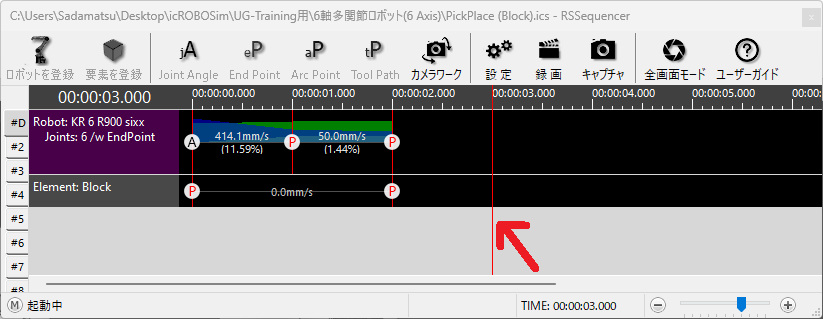
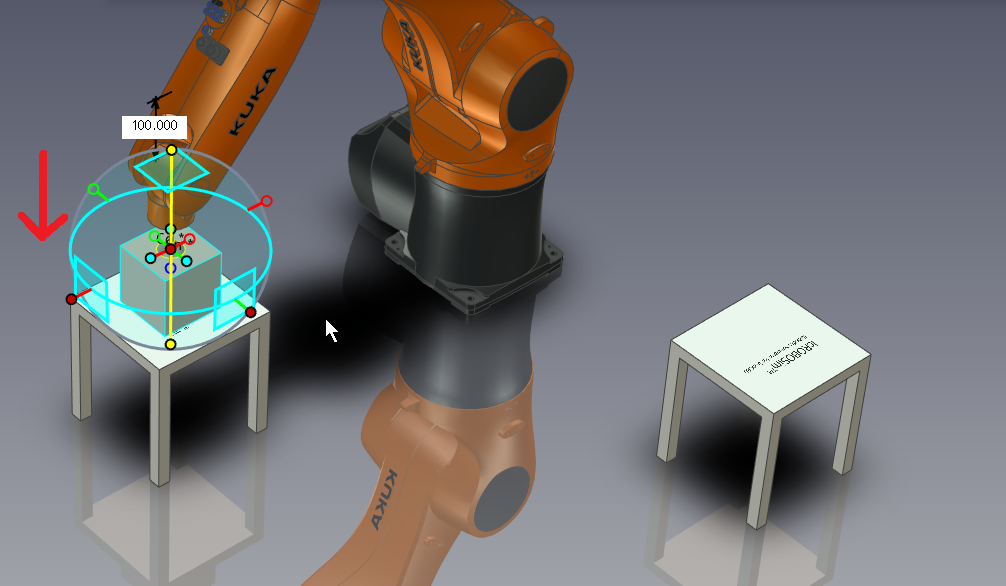
〔6〕1 秒地点のイベントを左クリックで選択し、TriBall で 50mm 垂直上方向に移動します。
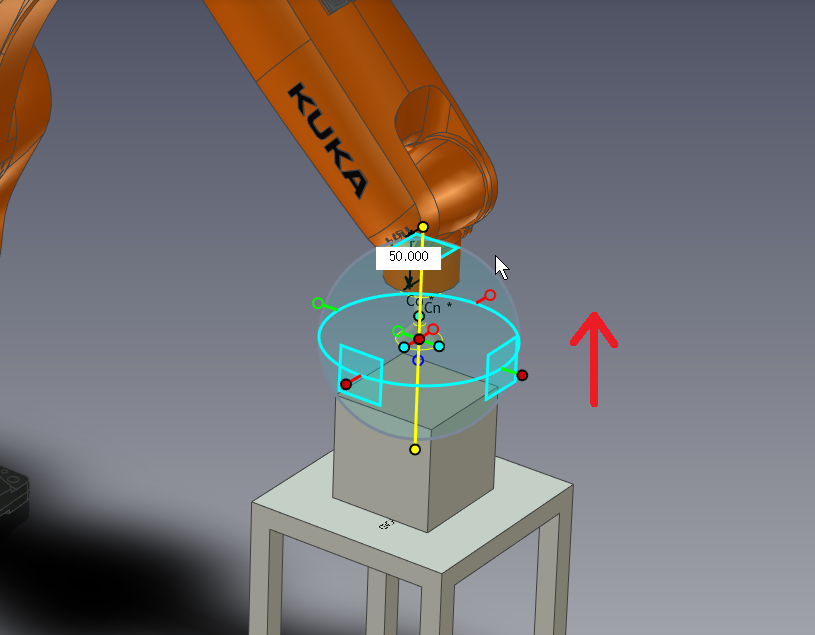
〔7〕RSSequencer画面 の[End Point] をクリックし、イベントを上書き登録します。
登録完了後、TriBall を解除し、RSSequencer画面 の赤いタイムラインを左右に動かし、動きを確認します。
ワークの移動動作を作成する
〔1〕[Block] の 0 秒地点のイベントを [コピー] し、2秒地点に [貼り付け] します。
〔2〕RSSequencer画面 の赤いタイムラインを 3 秒地点に設定します。
〔3〕シーンブラウザから [EndPoint] と [Block] をキーボードの Ctrlキーを押しながら複数選択します。
〔4〕TriBall を起動します。
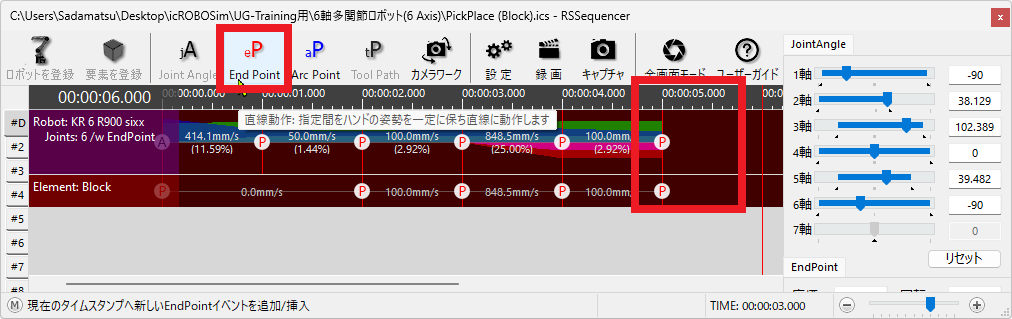
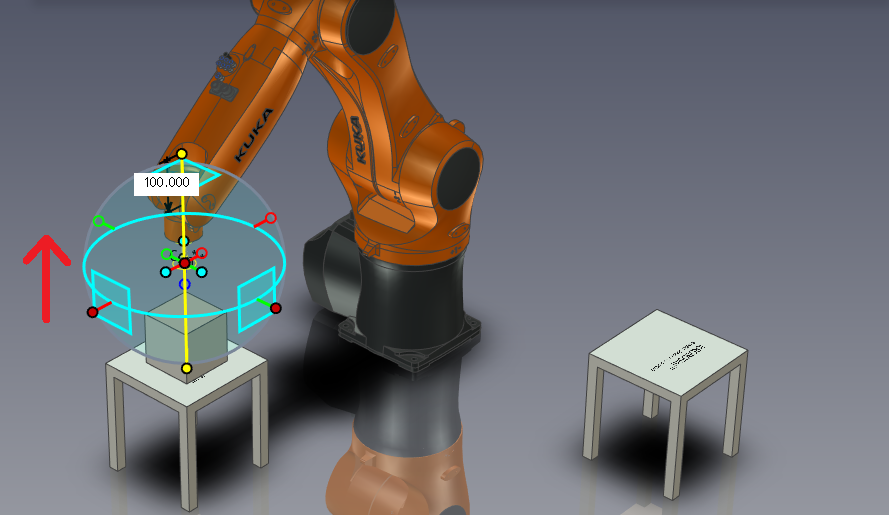
〔5〕垂直上方向に "100mm" 移動し、RSSequencer画面 の [End Point] で登録します。
〔6〕TriBall のX-Y 平面上で右クリックし、[点まで] を選択します。
〔7〕もう一つの台の上面中心点にマウスカーソルを合わせます。
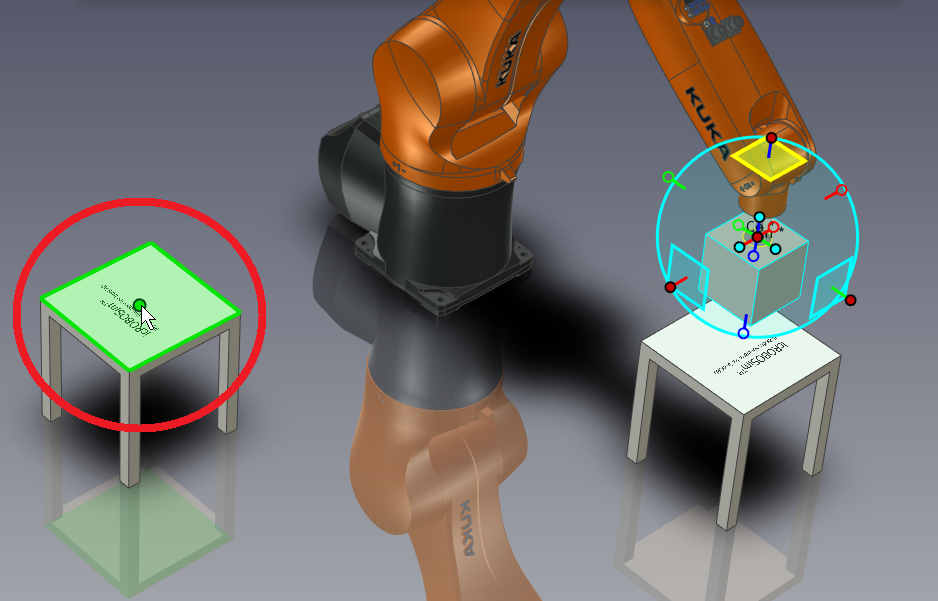
〔8〕台の中心点をクリックし、移動します。
〔9〕RSSequencer画面 の[End Point] で登録します。
〔10〕Triball で垂直下方向に 100mm 下げます。
〔11〕RSSequencer画面 の[End Point] で登録します。
登録完了後、TriBall を解除します。
ロボットを戻す動作を作成する
〔1〕シーンブラウザの "KR 6 R900 sixx" アセンブリを展開し、[EndPoint] アセンブリを選択し、TriBall を起動します。 (タイムラインは 6 秒地点に設定されていることを確認)
〔2〕垂直上方向に "100mm" 移動し、RSSequencer画面 の [End Point] で登録します。
〔3〕ロボットの 0 地点のイベントを [コピー] します。
〔4〕7 秒地点に [貼り付け] します。

登録完了後、TriBall を解除します。
以上で動作の設定は完了です。
シミュレーションが正常に動作することを確認します。