操作画面
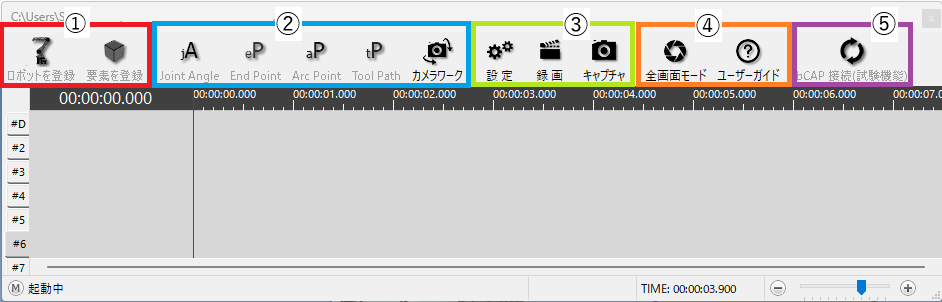
①データの登録コマンド
シミュレーションするためのデータを登録する際に使用します。
| コマンド | 内容 | 用途 |
|---|---|---|
| Capture Robot | 弊社提供のロボットデータを登録します。 | |
| Capture Element | Capture Robot 以外のすべてのデータを登録します。 |
弊社提供以外のサイトから入手したデータ(メーカーサイトや DL サイトなど)を Capture Robot で登録することはできません。
②動作の登録コマンド
シーケンス作成における動作の種類を選択できます。
| コマンド | 内容 | 用途 |
|---|---|---|
| Joint Angle | 各軸動作: 指定間をロボット任せで移動します。 | ロボットのみ指定可能 |
| End Point | 直線動作: 指定間をハンドの姿勢を一定に保ち直線に動作します。 | ロボット・要素両方で指定可能 |
| Arc Point | 円弧動作: 3 つのポイントを結ぶ円弧上をロボット先端が動作します。 Arc pointは、3 点指定の中間に当たる位置に設定します。 ※単独では円弧動作はできません。 |
ロボット・要素両方で指定可能 |
| Tool Path | ツールパス: 指定したエッジや面の外形に沿ったツールパス動作を設定します。 | 主にロボット:シール塗布・ヘミングなど |
③オプションコマンド
| コマンド | 内容 |
|---|---|
| 設定 | icROBOSim のオプション設定 |
| 録画 | 作成したシミュレーションの動画を撮ります。 |
| キャプチャ | 現在の IRONCAD画面 をキャプチャする際に使用します。 |
④その他
| コマンド | 内容 |
|---|---|
| 全画面モード | リボンやシーンブラウザ、カタログブラウザを一時的に非表示して、 画面を広く使用できます。 |
| ユーザーガイド | 本ユーザーガイドへリンクされます。 |
コマンドからユーザーガイドを起動にはインターネット接続が必要です。
⑤ダイレクト通信(デンソーロボットのみ)
| コマンド | 内容 |
|---|---|
| bCAP接続(試験機能) | icROBOSim とデンソーロボットを直接つなぎ、動作させることができます。 |
こちらは試験機能です。 ダイレクト動作させる場合は、ORiN SDKなどの ソフトウェアが別途必要になります。 ご質問は弊社へご連絡ください。