ロボットの再配置
本項では、ロボットに対するシミュレーションを作成後に位置変更が必要となった場合について説明します。
構想検討フェーズや仕様変更の発生時に先端(ハンド)部の位置を変えず、ロボットを再配置することができます。
※サンプルデータで練習してみましょう。
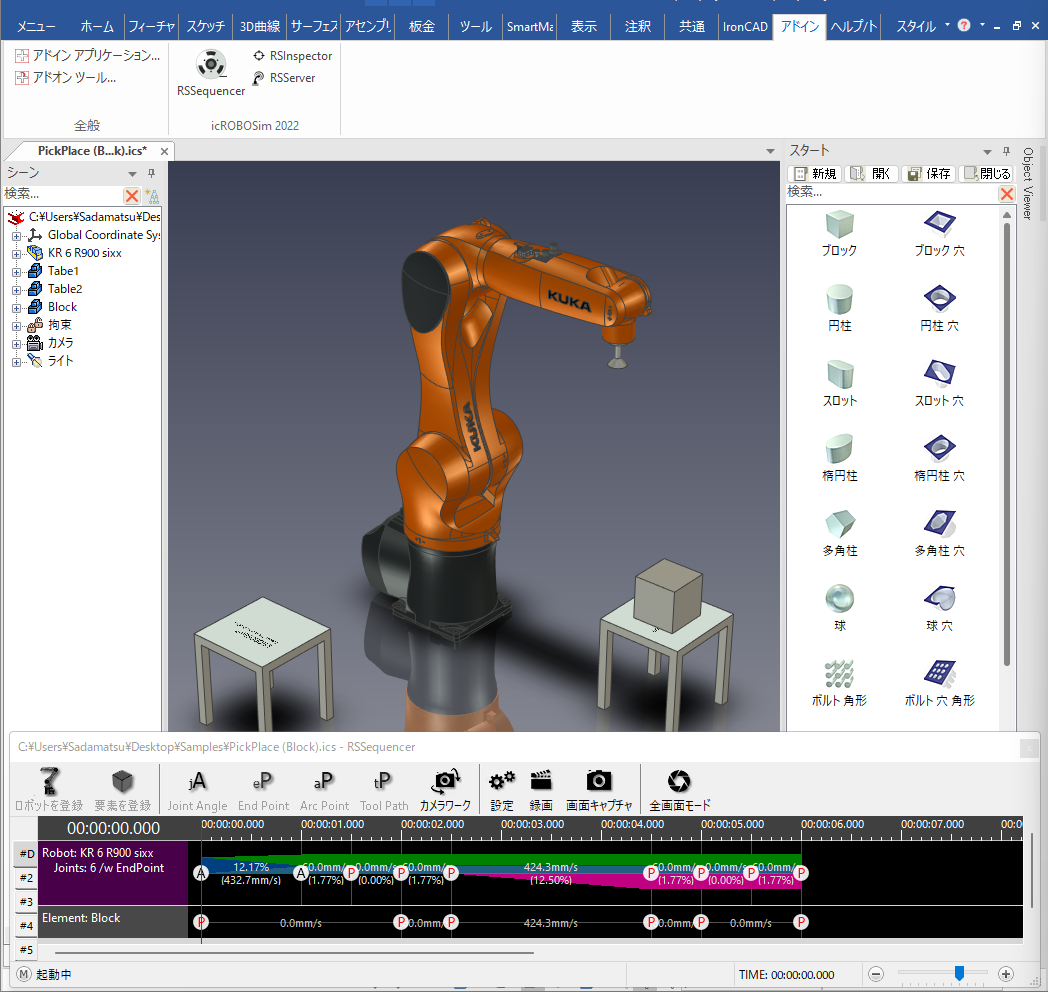
Samplesフォルダから「PickPlace (Block).ics」を開きます。
再配置
手順 1 [再配置]コマンドを起動する
〔1〕RSSequencer を開きます。

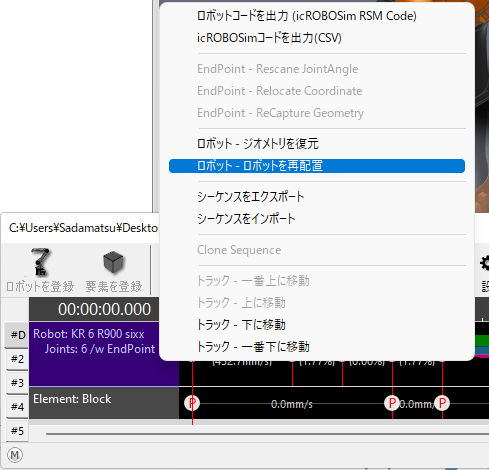
ロボットのトラックを右クリックし、[ロボット - ロボットを再配置] をクリックします。
手順 2 ロボットの位置を移動する
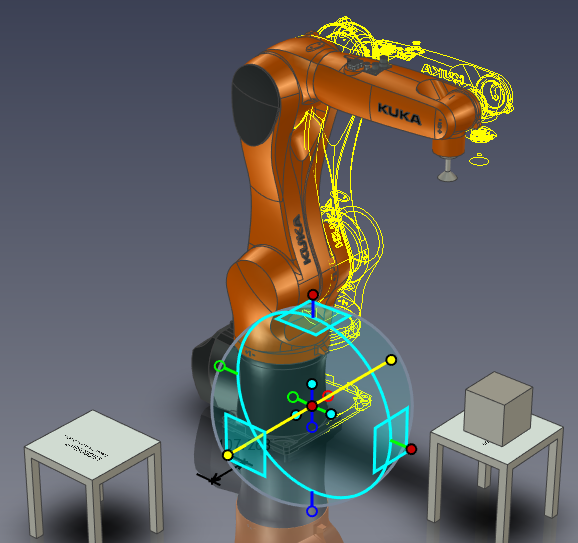
〔1〕ロボットデータに対し、TriBall が自動で起動します。
〔2〕TriBall で位置を移動します。
〔3〕[OK] をクリックします。
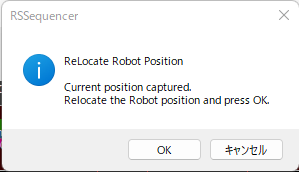
〔4〕先端(ハンド)部の位置は変わらず、配置変更した位置で再生成されます。
-
再配置は XYZ の直線方向だけでなく、回転にも対応可能です。
やむを得ずロボットを傾ける必要がある場合は、傾けて再配置できます。
参考:ロボットの再配置
位置を戻す場合
IRONCAD側 の画面と RSSequencer画面 の両方で、「戻る」コマンドを実行してください。
戻るコマンドは、キーボードの〔ctrl+z〕キー