干渉チェック
本項では、干渉チェック手法について説明します。
※サンプルデータで練習してみましょう。
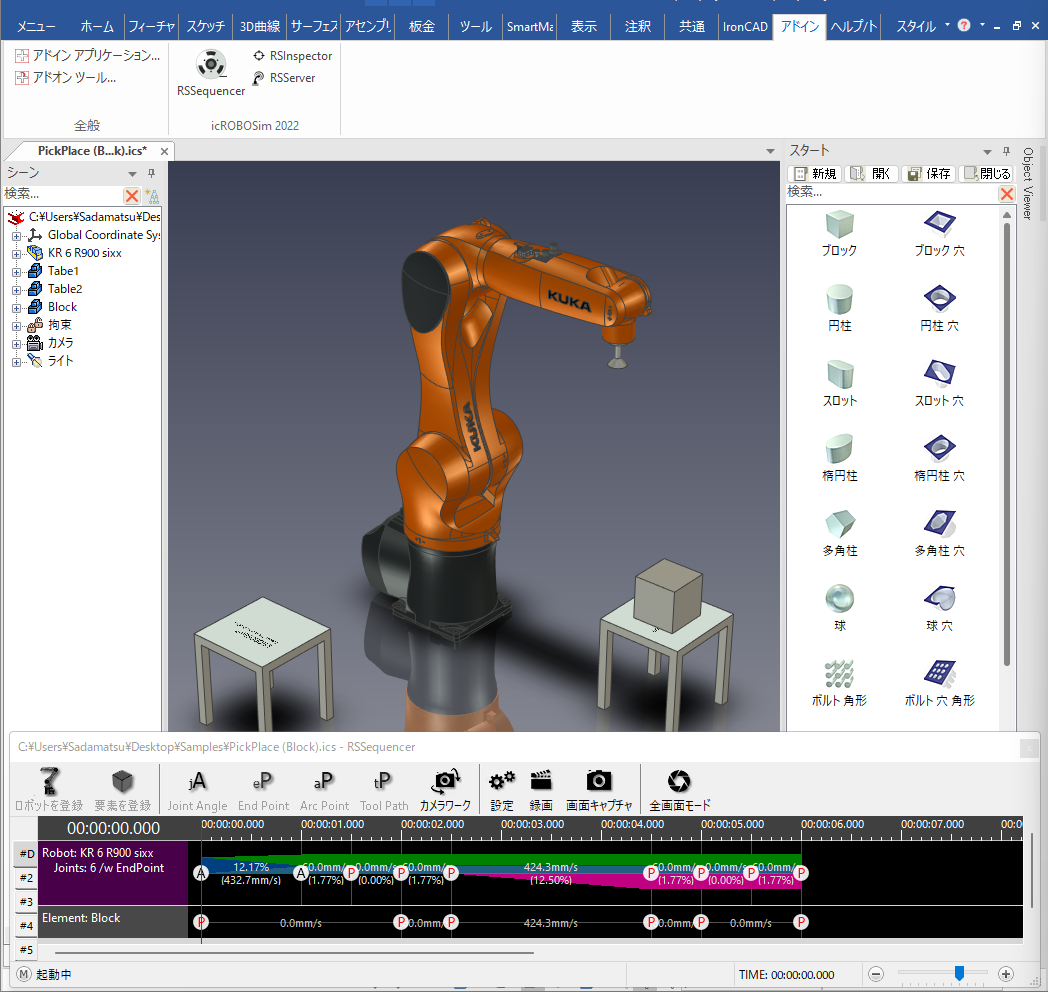
Samplesフォルダから「PickPlace (Block).ics」を開きます。
再配置
手順 1 開く
RSSequencer を開きます。

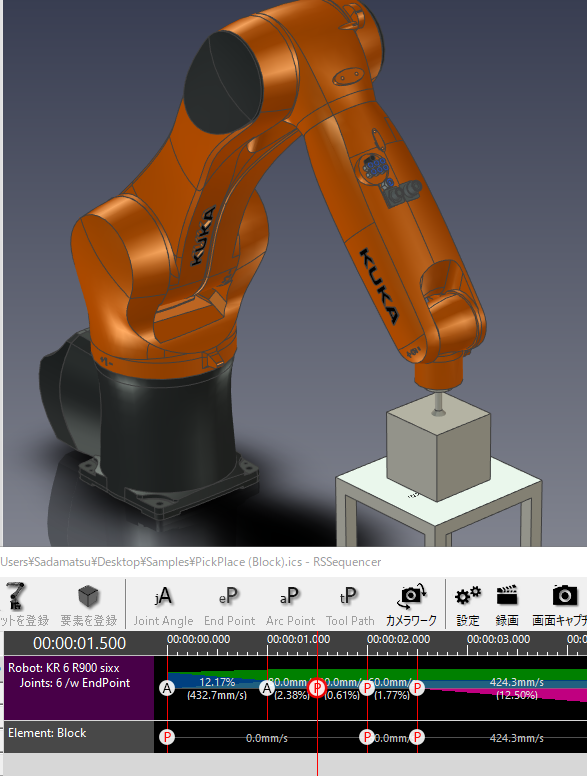
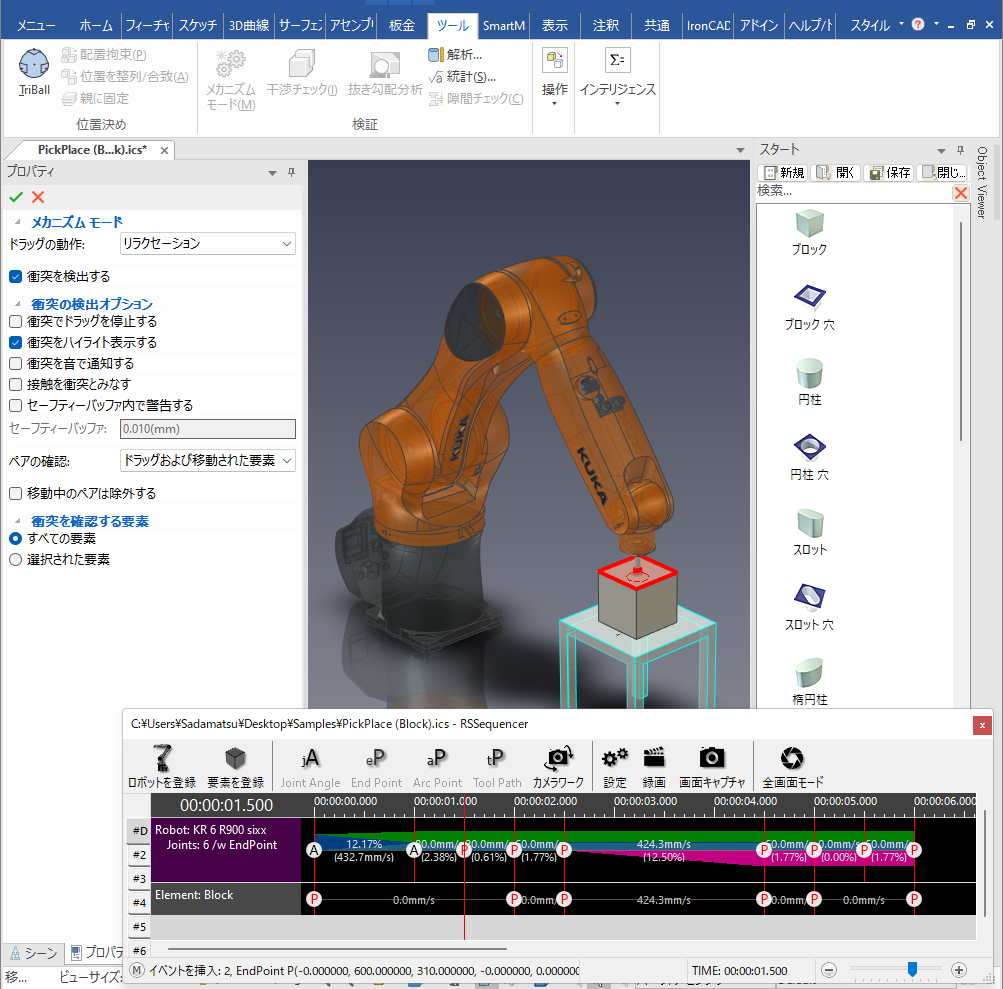
手順 2 干渉状態を作成する
ロボットの 1.5秒 のイベントをブロックに干渉するように移動し、[End Point] で再登録します。
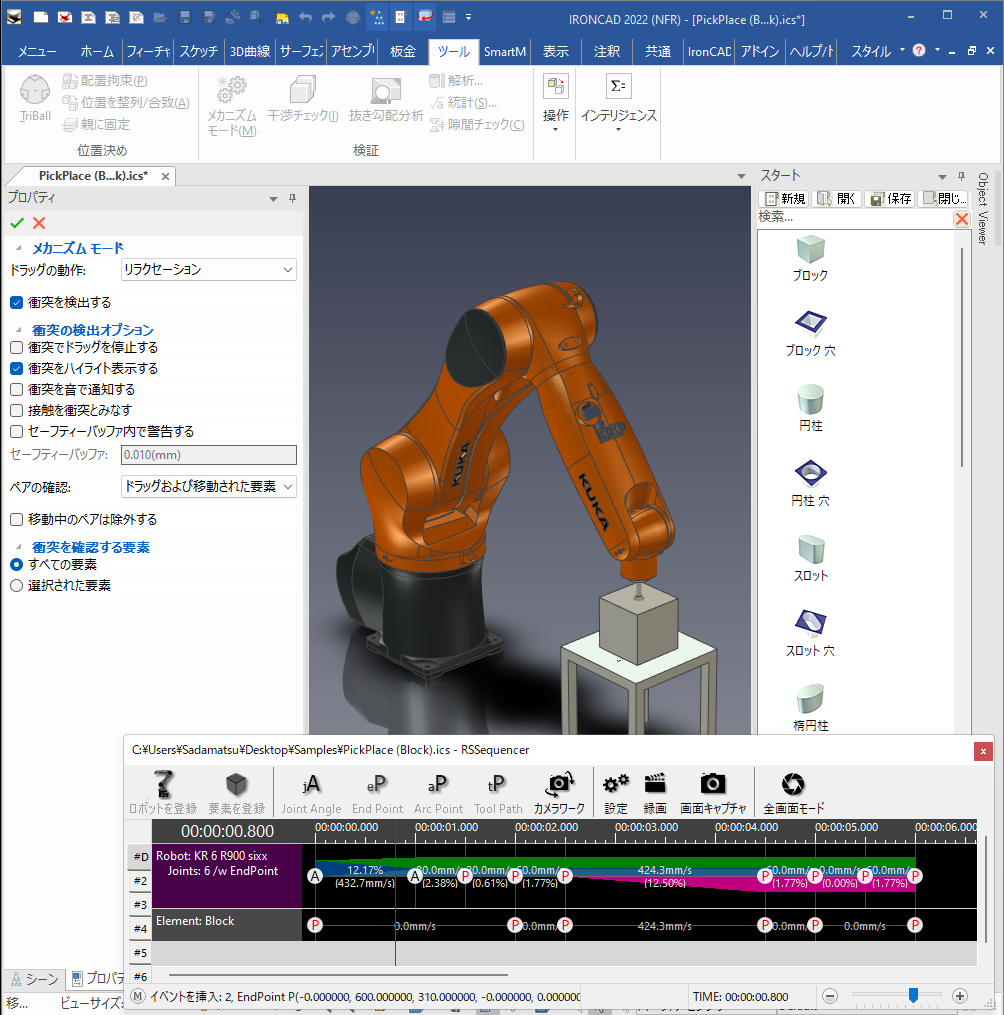
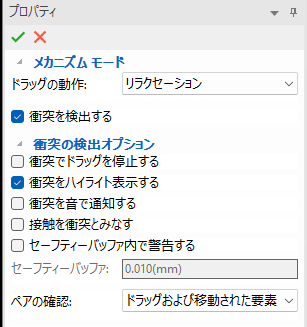
手順 3 メカニズムモードを設定する
IRONCAD のツールタブ - [メカニズムモード] をクリックします。
設定は画像を参照
手順 4 干渉チェックする
〔1〕1つパーツを選択します。 ※周辺パーツのどれでも可
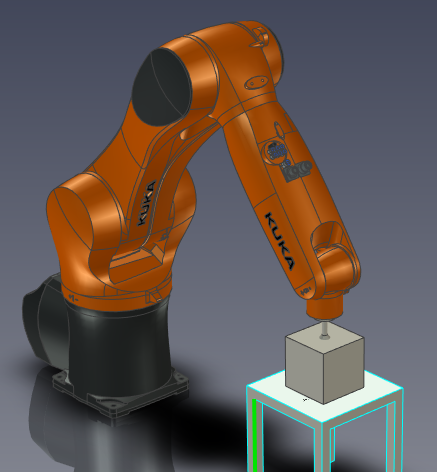
〔2〕タイムラインを移動して、確認する
-
再配置は XYZ の直線方向だけでなく、回転にも対応可能です。
手順 5 終了する
メカニズムモードを [×] で解除し、終了します。
参考動画:干渉チェック(ロボット)
参考動画:干渉チェック(要素)
ロボット以外のデータで干渉チェックする際の注意点
-
要素のみでは通常、干渉チェックができません。
ダミーのロボットをシーンに配置し、RSSequencer で [ロボットを登録] してください。
RSSequencer に登録後はロボットデータを抑制(非表示)することで影響なく、メカニズムモードの干渉チェックが可能です。