Tool Path (エッジ指定)
本項目では [Tool Path] (エッジ指定)の動作イベント について説明します。
Tool Path は、"ロボット" のみに設定可能なイベントです。
ロボットの動作は基本的に TriBall を使用し、先端(ハンド)部を移動して作成しますが、 Tool Path は開始点を指定した後にソリッド・サーフェスのエッジや面の外形線を動作パスとして指定することで、先端(ハンド)部が始点から目標点までガイドに沿って移動することができます。
-
ロボットの動作はガイドパスの選択方法や作成方法により変化します。
そのため、ツールパスを実行する前に動かしたいイメージにあったガイドデータの作成が重要です。
ロボット先端の姿勢を固定して動かす場合
※サンプルデータで練習してみましょう。
Samplesフォルダから「ArcPoint.ics」を開きます。
手順1. パスデータを作成する
今回は、[Part11]ブロック の外形をガイドパスに指定
〔1〕上面のサーフェスを抽出する。
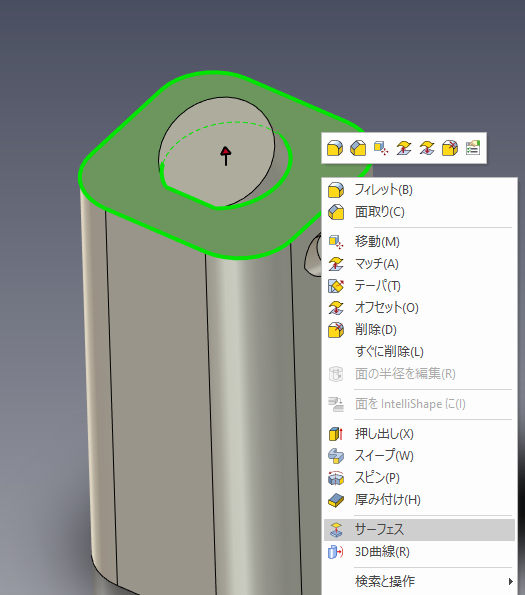
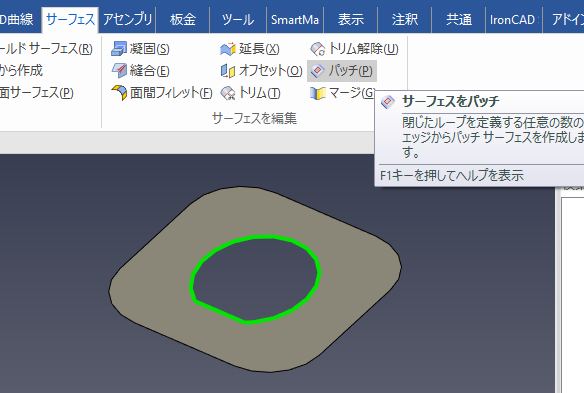
〔2〕穴に [パッチ] を貼る
〔3〕2つのサーフェスを [縫合] する
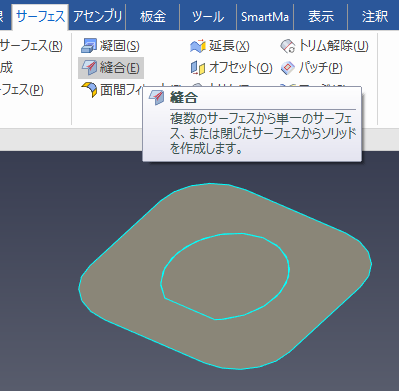
穴のふさがったサーフェスが作成されます。
手順2. 新規でロボットを登録する
※RSSequencer は、1つの IRONCAD データに対して 8個 の異なるシミュレーションを作成することができます。
〔1〕RSSequencer画面 の一番左側には縦方向にシートがあります。
[#2]をクリックします。
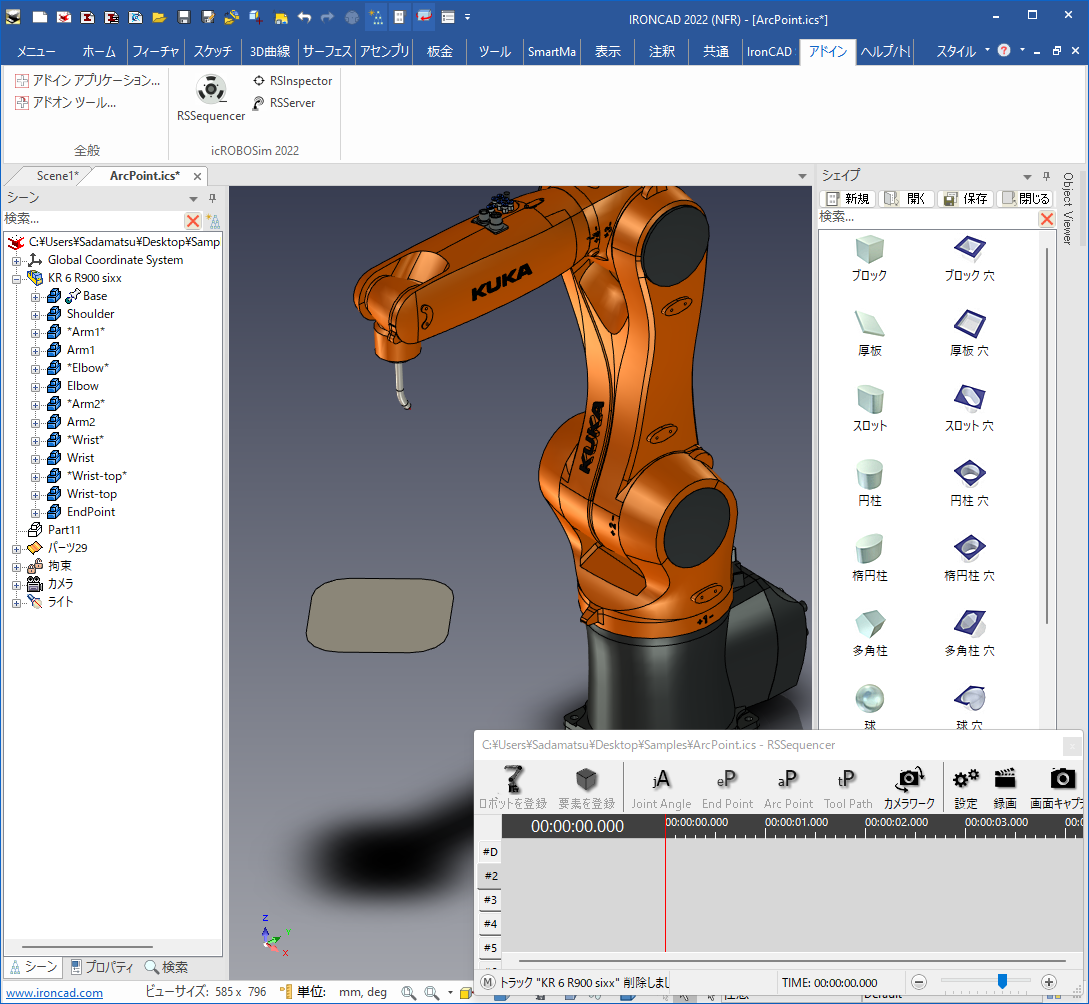
〔2〕ロボットアセンブリを選択し、[ロボットに登録] をクリックします。
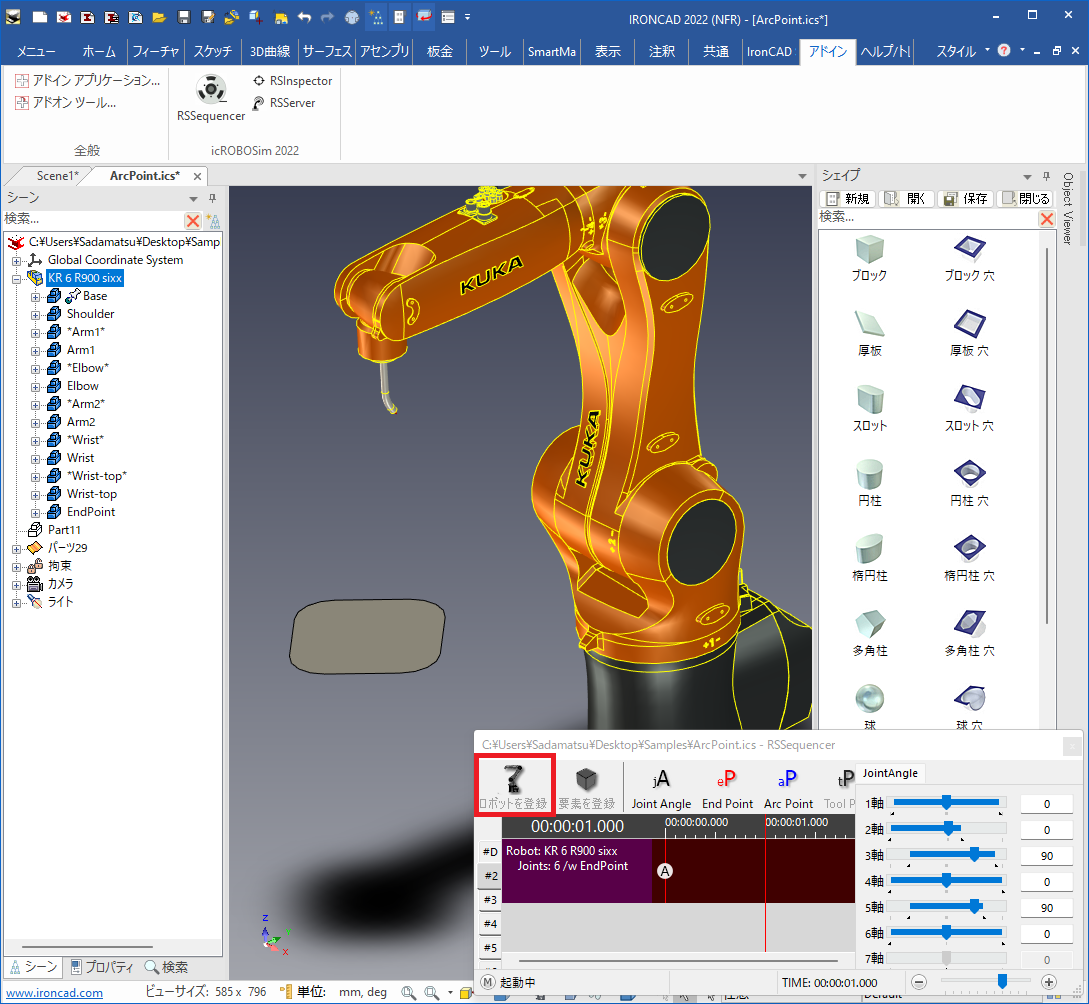
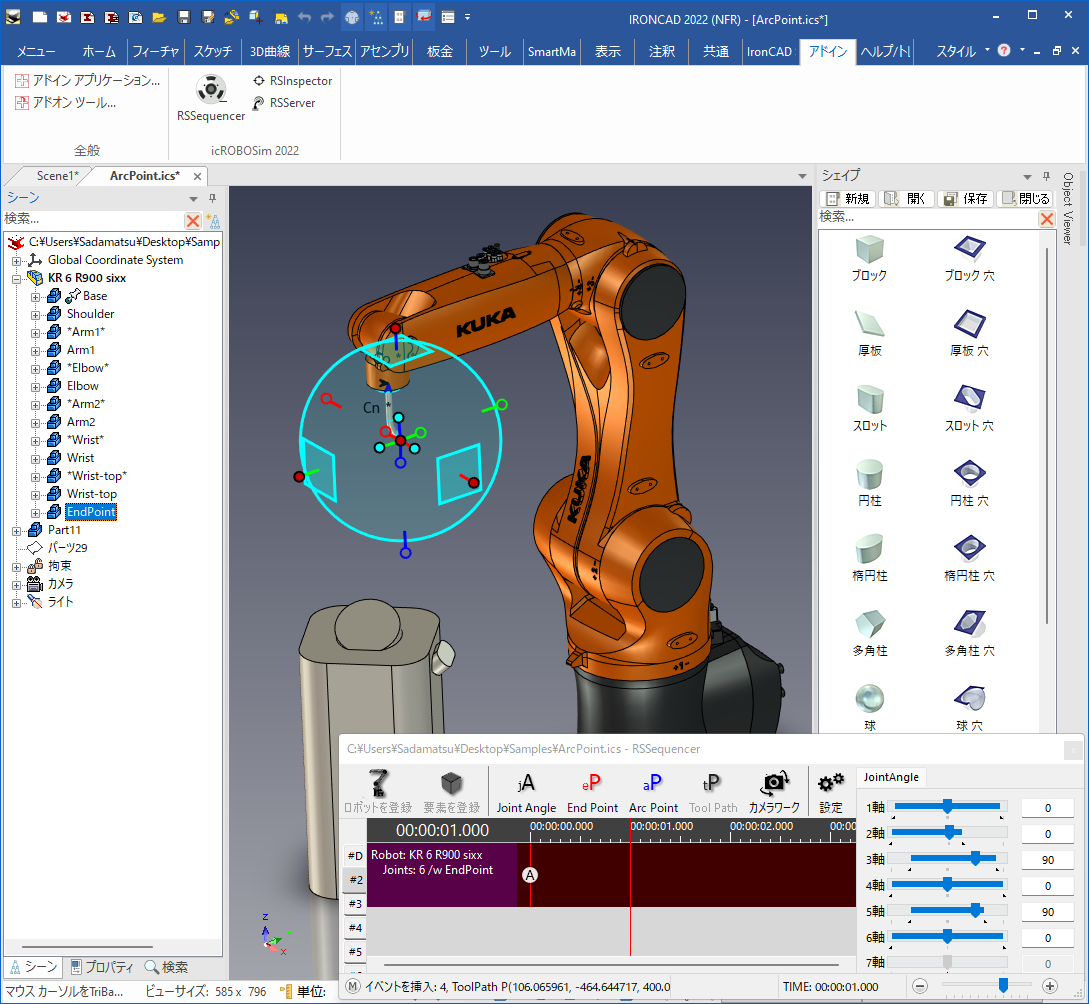
手順3. 位置を登録する
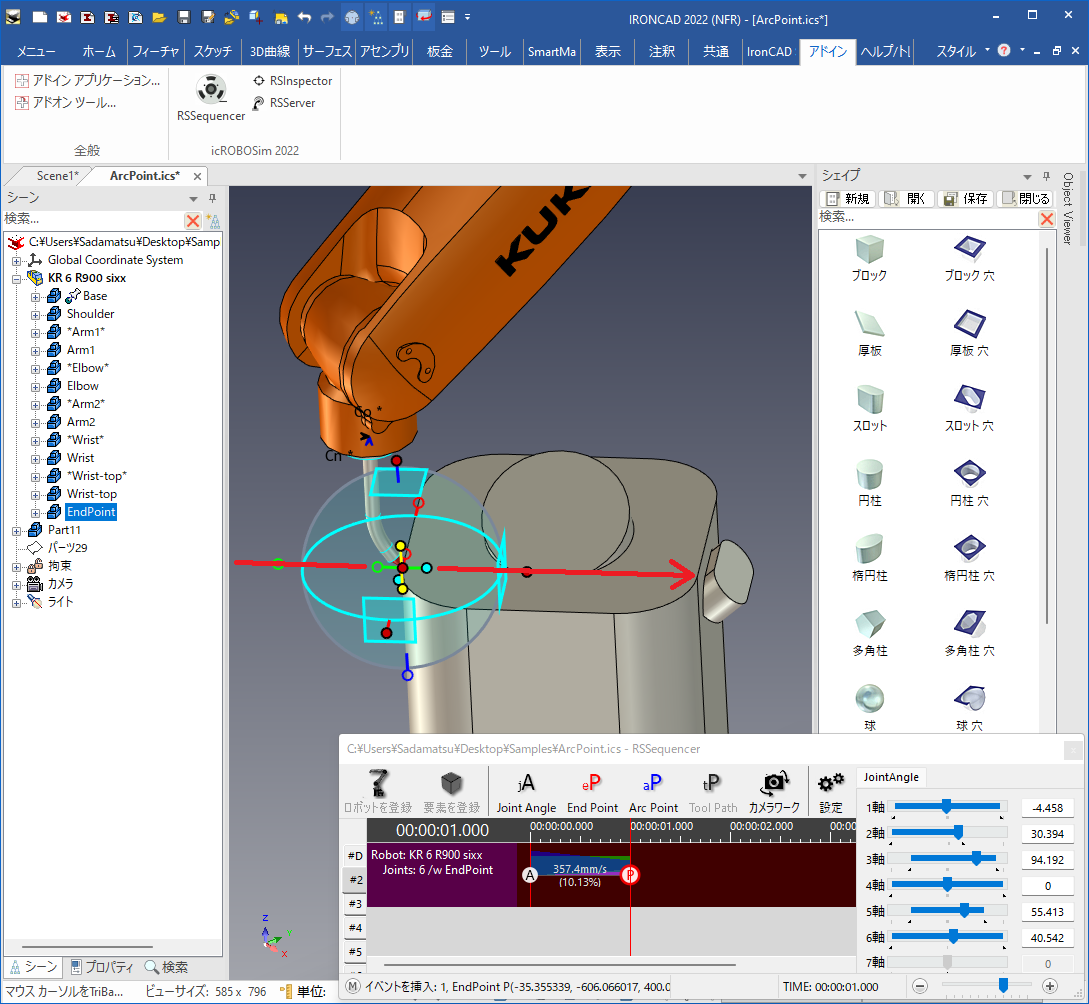
〔1〕ロボットアセンブリを開き、EndPointアセンブリ を選択します。
続けて、TriBall を起動します。
〔2〕TriBall で作成したサーフェスのエッジ端点に移動します。
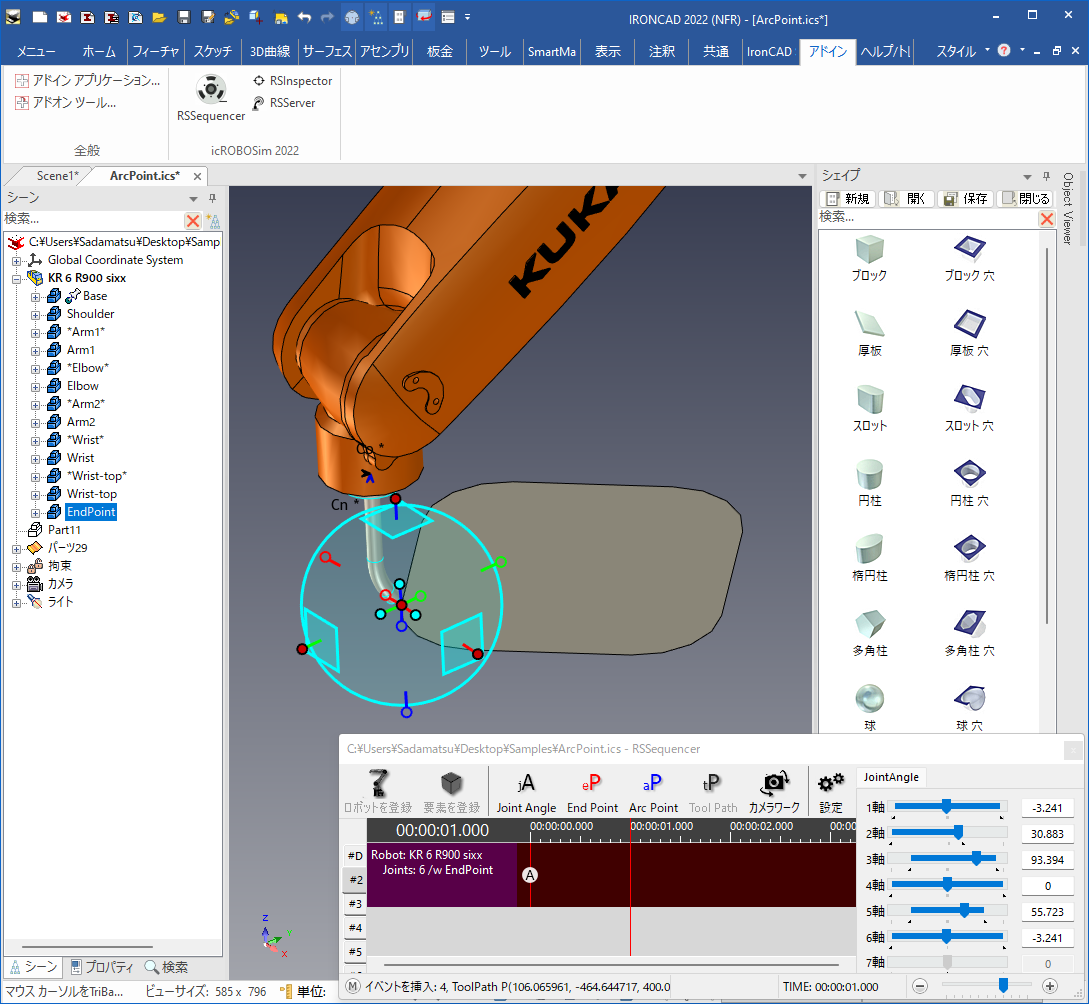
TriBall で向きを修正し、[EndPoint] をクリックします。
ここでは、円弧の垂線方向に合わせます。
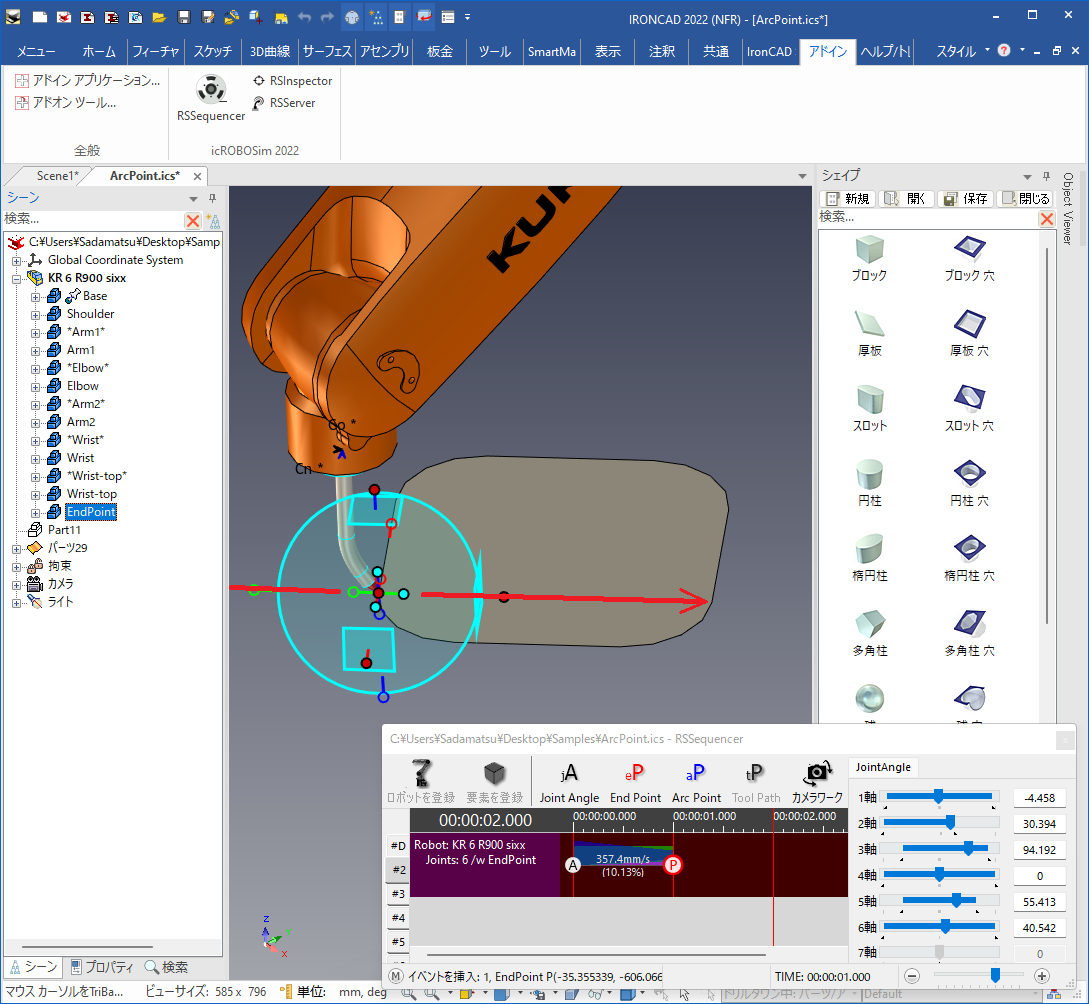
〔3〕サーフェス外形のエッジを Shiftキー を押しながら選択します。
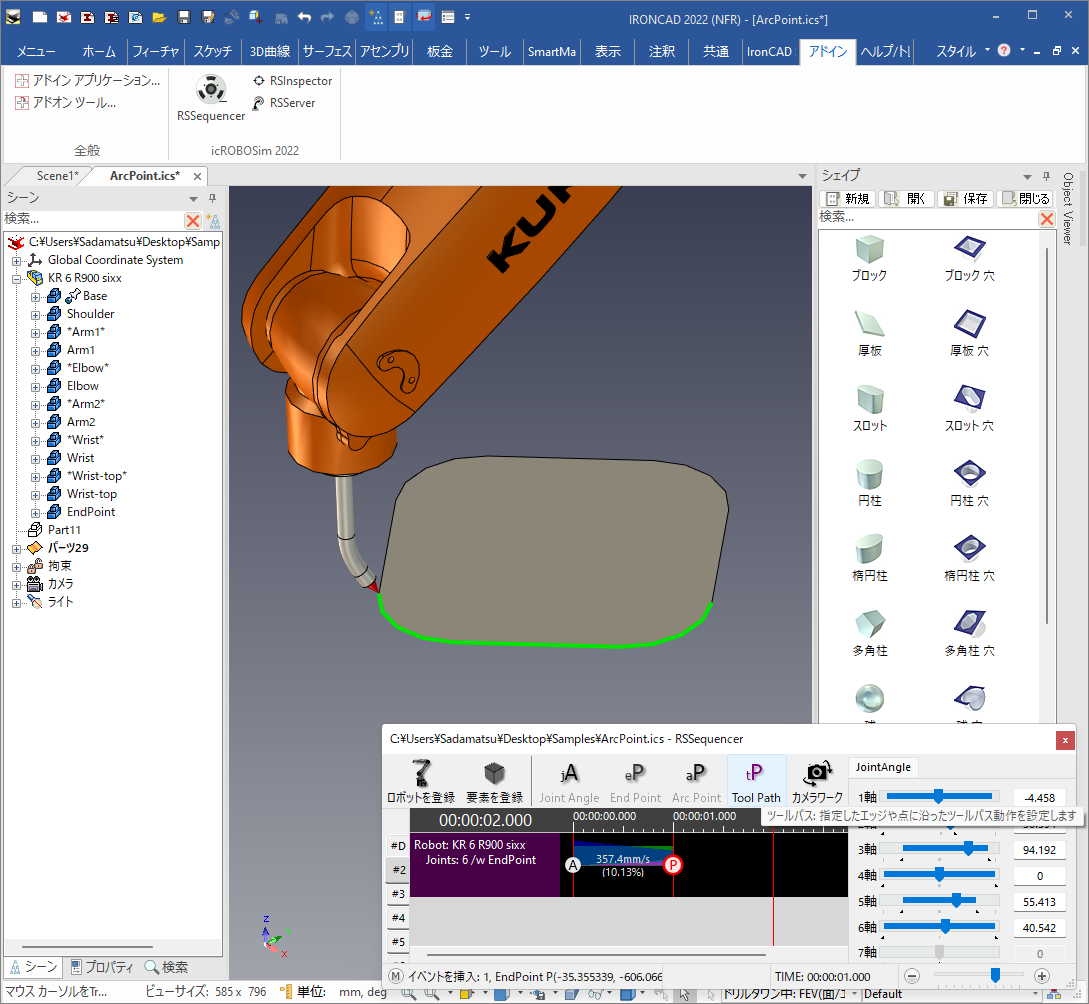
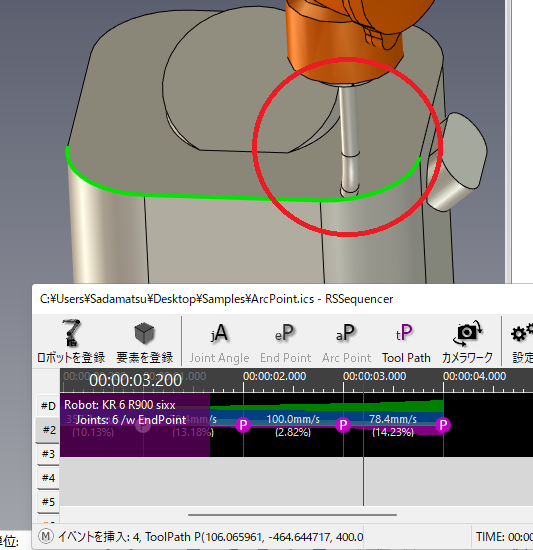
〔4〕[Tool Path] をクリックします。
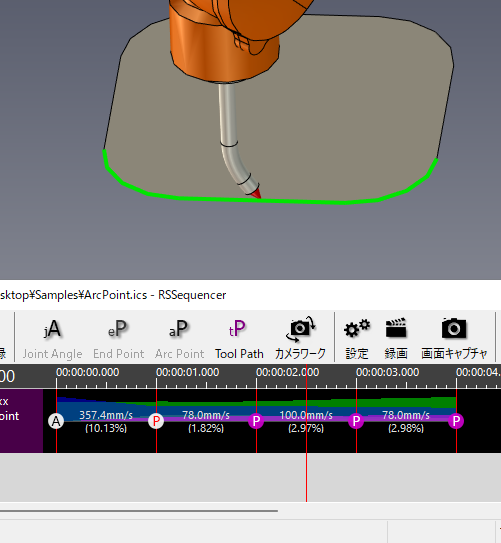
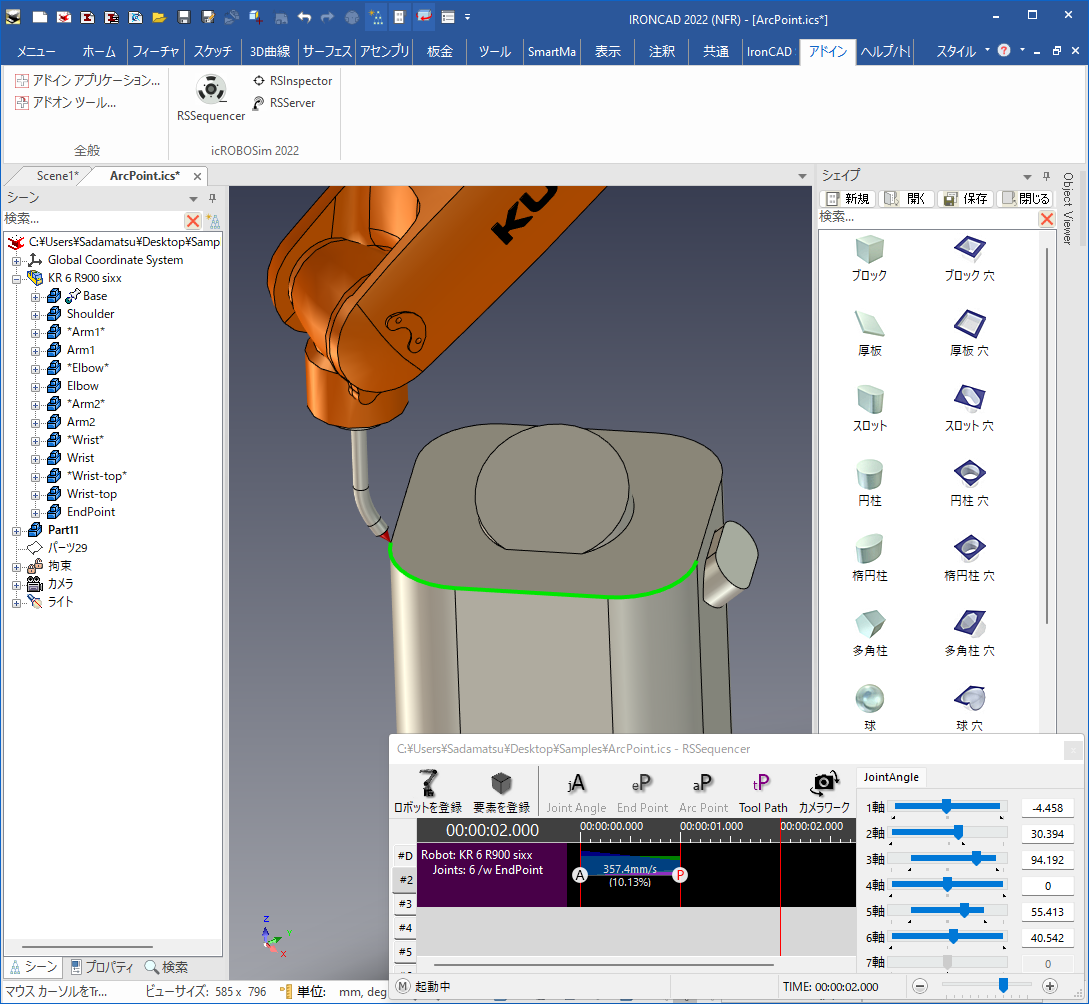
先端(トーチ)部は回転せず、指定したエッジをなぞります。
ライムラインに紫色の "P" が作成されます。
手順4. 動作を確認する
〔1〕RSSequencer画面 を伸ばし、登録したイベント全体が見えるように調整します。
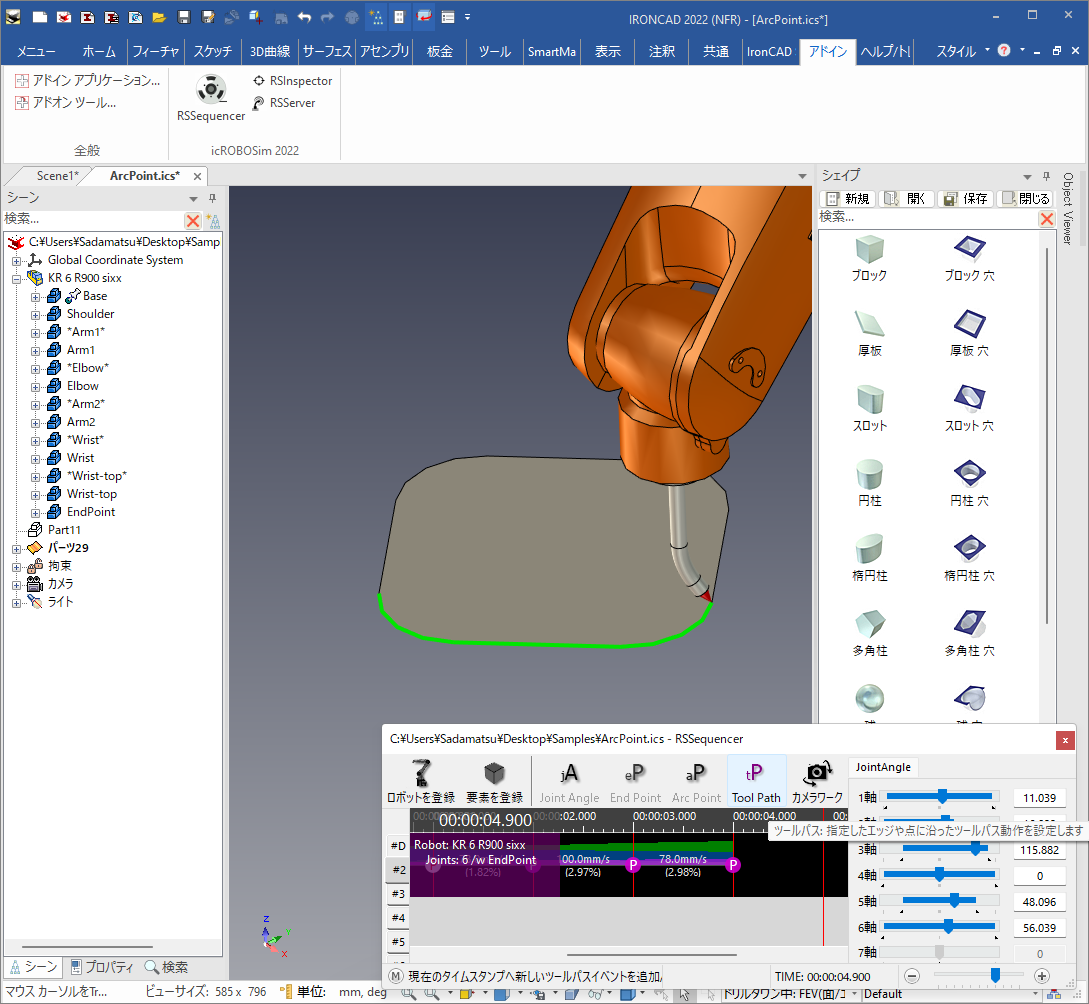
〔2〕手順2 で登録した 1 秒~ 4 秒の区間を赤いタイムラインを動かします。
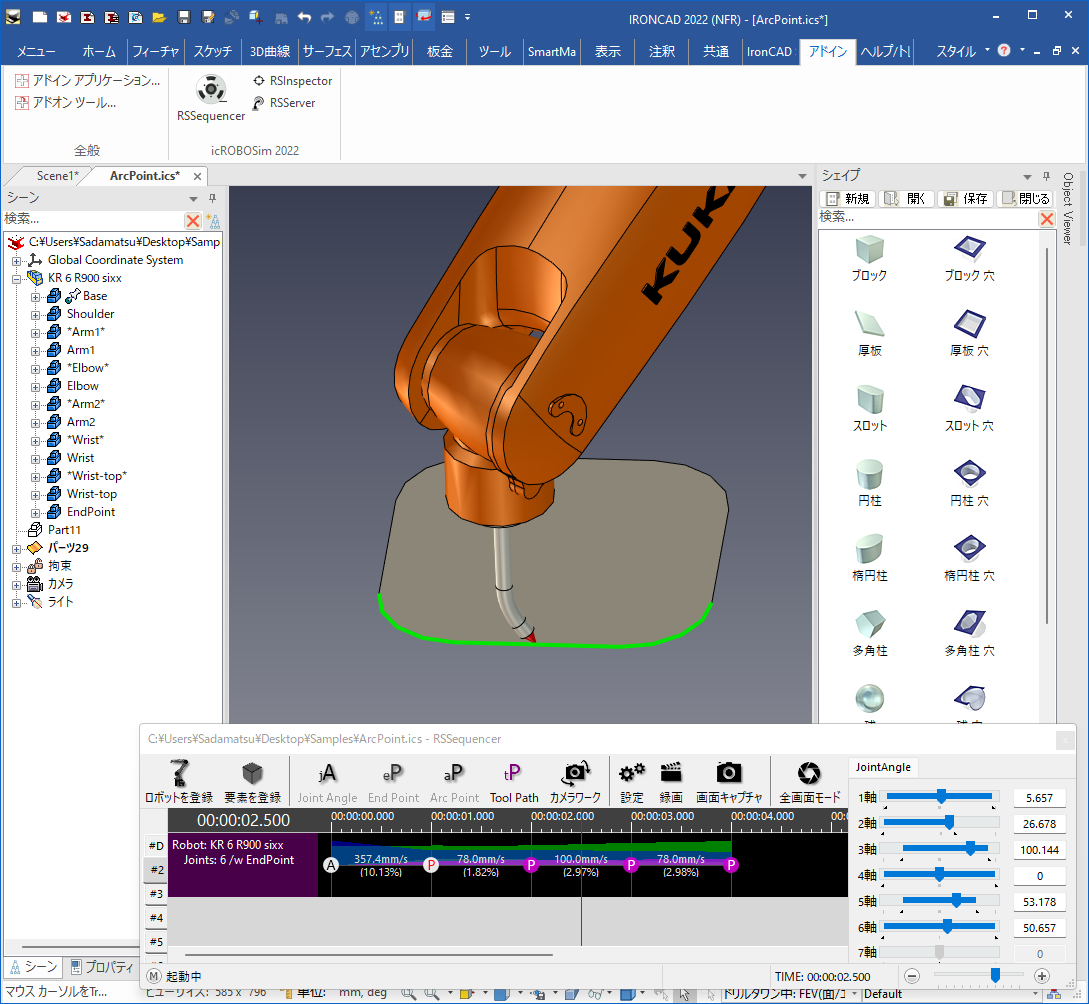
〔3〕先端ハンド部の動きを確認します。 トーチ先端部は指定したエッジに沿って、移動します。
-
Tool Path の開始位置となる [End Point] の姿勢(ハンドの角度や方向)を TriBall で調整してください。
※本ガイドでは、1秒地点の [End Point] 登録した位置
初期姿勢を保って動作します。
ロボット先端部を形状に沿って動かす場合
-
今回の練習では、ガイドデータを作成する必要はありませんが、状況に応じて作成が必要となる場合があります。
手順1. 位置を登録する
〔1〕ロボットアセンブリを開き、EndPointアセンブリ を選択します。
続けて、TriBall を起動します。
〔2〕TriBall でブロックのエッジ端点に移動します。
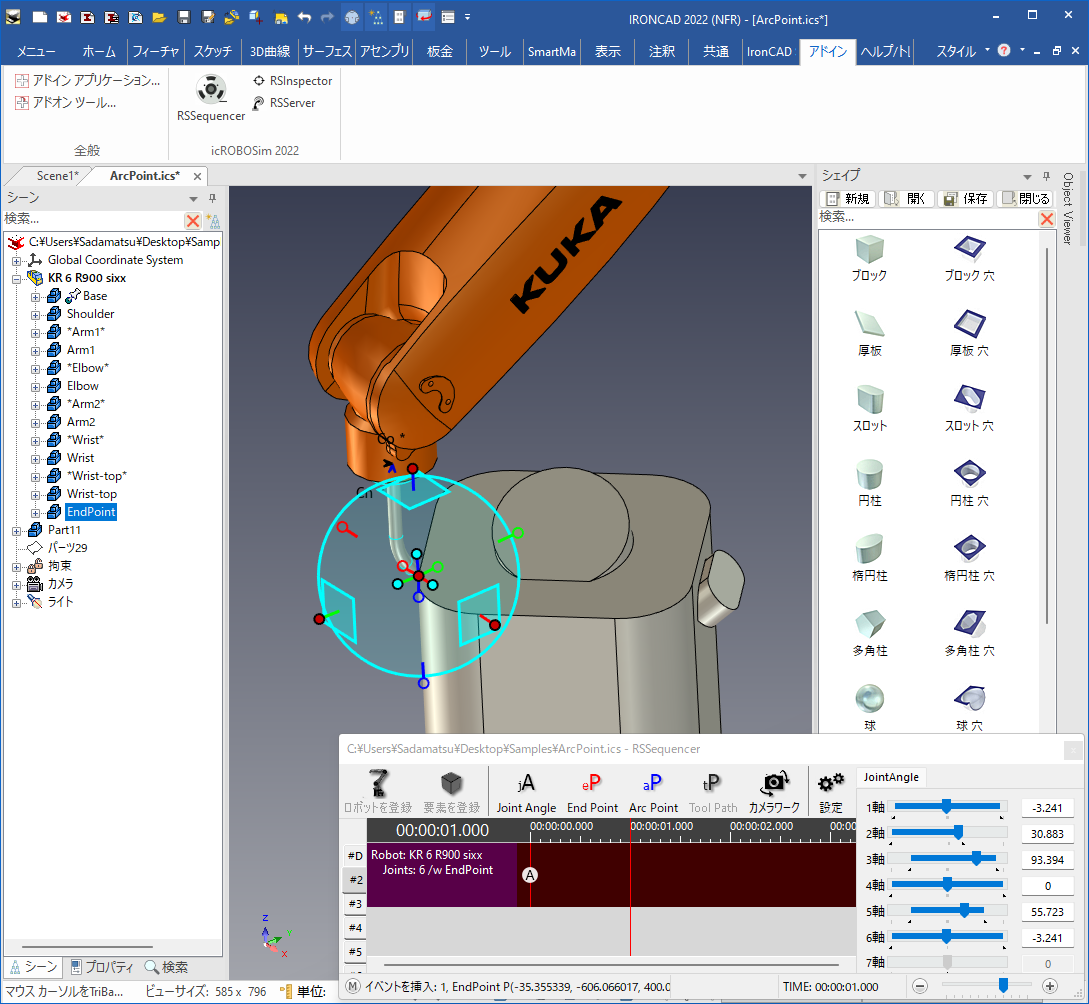
TriBall で向きを修正し、[EndPoint] をクリックします。
ここでは、円弧の垂線方向に合わせます。
完了後、TriBall を終了します。
〔3〕ブロック外形のエッジを Shiftキー を押しながら選択します。
〔4〕[Tool Path] をクリックします。
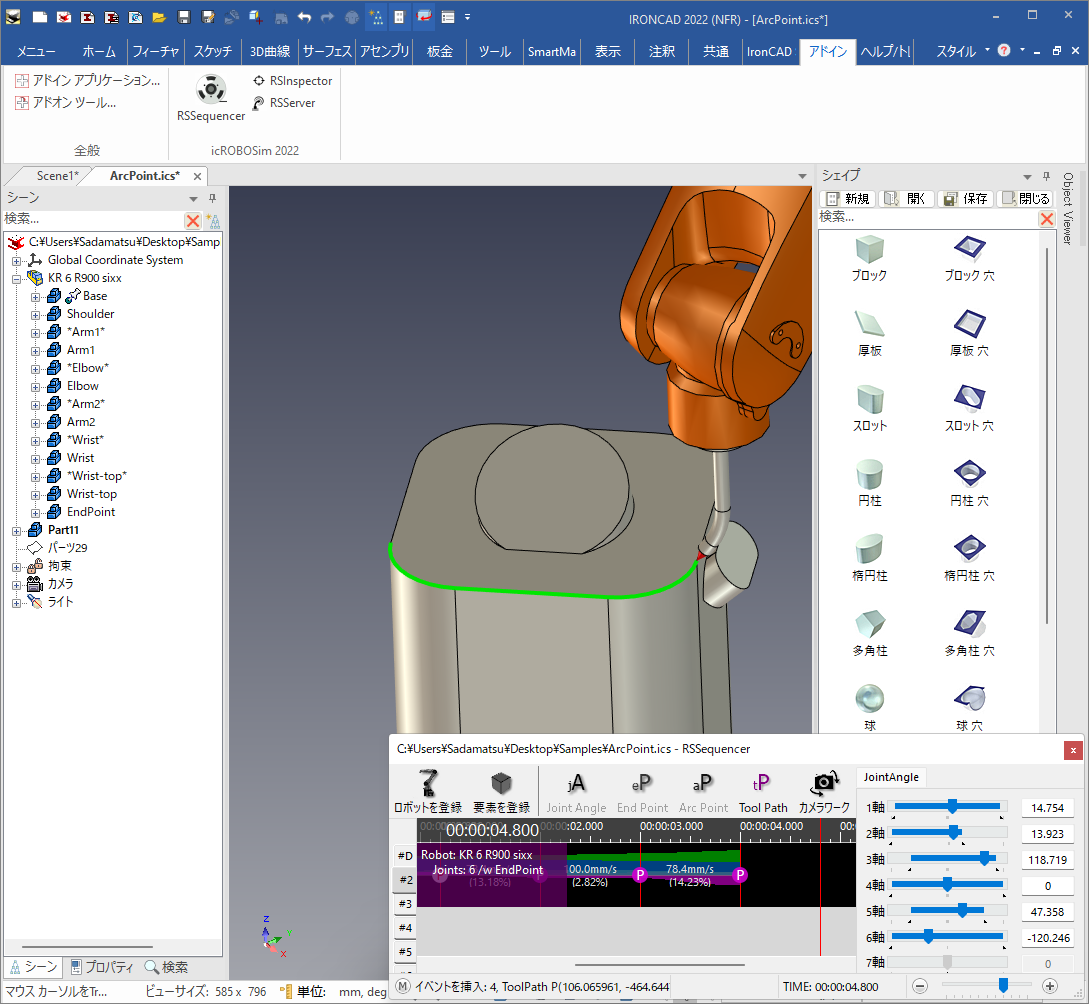
先端(トーチ)部はブロックの側面に対して垂直な方向に変化しながら、指定したエッジをなぞります。
ライムラインに紫色の "P" が作成されます。
手順2. 動作を確認する
〔1〕RSSequencer画面 を伸ばし、登録したイベント全体が見えるように調整します。
〔2〕手順2 で登録した 1 秒~ 4 秒の区間を赤いタイムラインを動かします。

〔3〕先端ハンド部の動きを確認します。 トーチ先端部は視線が変化しながら指定したエッジに沿って、移動します。