デンソーロボット リアルタイム動作(試験機能)
作成した icROBOSimシミュレーションで、RSSequencer のタイムラインを動かすとデンソーロボットがダイレクトに動く機能を試験的に実装しました。
動作は、J型変数の情報がロボットへ送られます。 速く動かすと、途中の経路をショートカットします(動作命令は @P)。
Professinalライセンス(有償) が必要です。
COBOTTA シリーズの場合は、バーチャルTP のインストールが必要です。
RC8 コントローラーのみ対応
実際に動かす場合は、周囲の人や干渉物に十分注意してご使用ください。 動作により発生したケガや事故に関して、当社では一切責任を負いかねます。
PC の IPアドレスを設定する
〔1〕パソコンとロボットコントローラーを LAN で接続します。
〔2〕パソコンに接続元の IPアドレス を設定します。
Windows マークを右クリックし、[設定] を開きます。
[ネットワークとインターネット] → [イーサネット] を展開します。

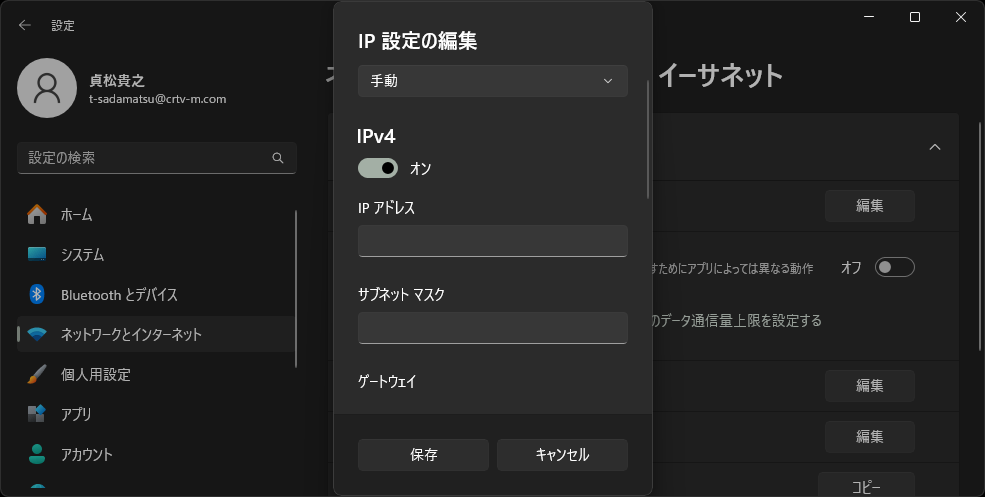
〔3〕[IP 割り当て] の [編集] をクリックします。

〔4〕[手動] を選択し、IPv4 をオンします。 IPアドレス とサブネット マスク を入力し、[保存] をクリックします。
これで設定は完了です。
ロボットとPC を接続する
〔1〕RC8コントローラーまたはバーチャルTP(RC8) の設定を実施します。 ※こちらの操作方法は、メーカーへご確認ください。
RSSequencer とロボットを接続する
〔1〕RSSequencer タイムラインを 0秒地点に移動します。
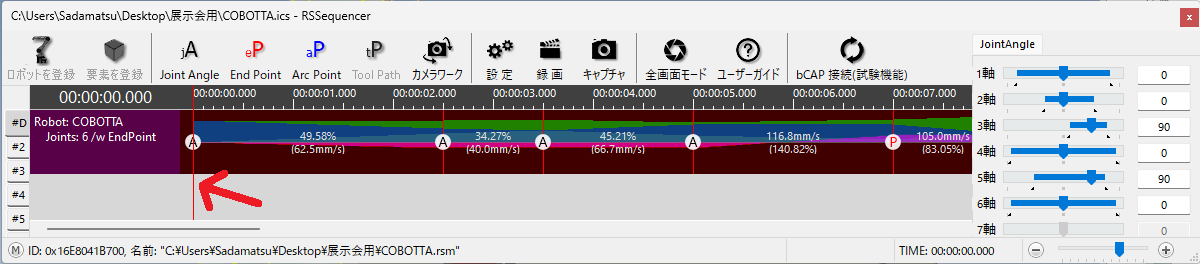
〔2〕RSSequencer のロボット名を左クリックします。 ※行全体が紫色の状態
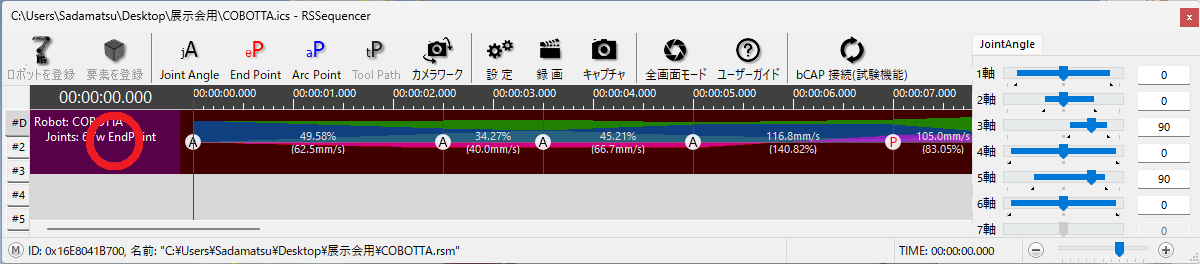
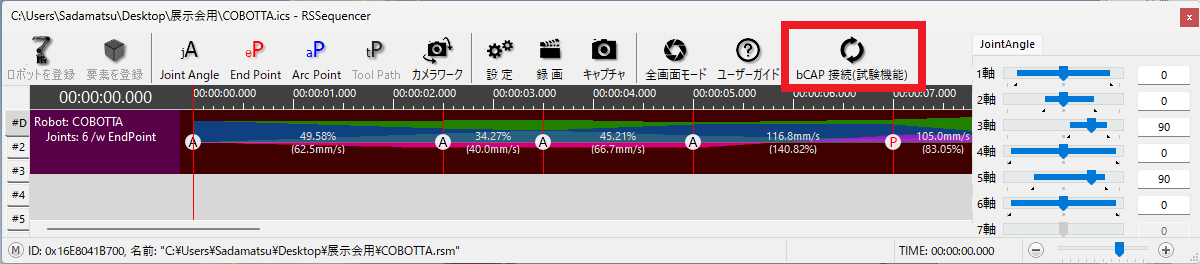
〔3〕[bCAP 接続(試験機能)] をクリックします。
〔4〕以下のダイアログが表示します。
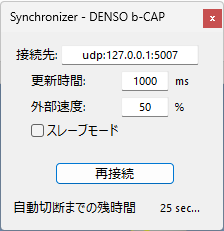
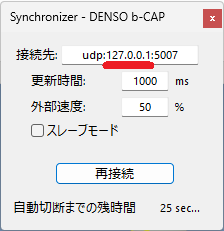
〔5〕接続先を入力します。 ※ロボットコントローラーの IPアドレス
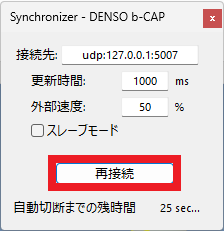
〔6〕[再接続] をクリックします。
〔7〕RSSequencer のタイムラインを右にゆっくり動かし、ロボットが動くことを確認します。
※接続が切れたり、つながらない場合は、再度ロボット名を左クリックし、[bCAP 接続(試験機能)] をクリックします。
1回で接続できない場合がありますので、その場合は何度か再接続をお試しください。
bCAP 接続してロボットとつなげる際、RSSequencer の赤いタイムラインの位置に移動します。必ず 0秒地点または安全な姿勢で接続してください。
対象機種:COBOTTA