先端部(ハンド)の設定
ロボットの先端には、お客様で設計されたハンドや購入品のツールを配置して、ロボットの動きと連動することができます。
ハンドツールはお客様側でご準備ください。
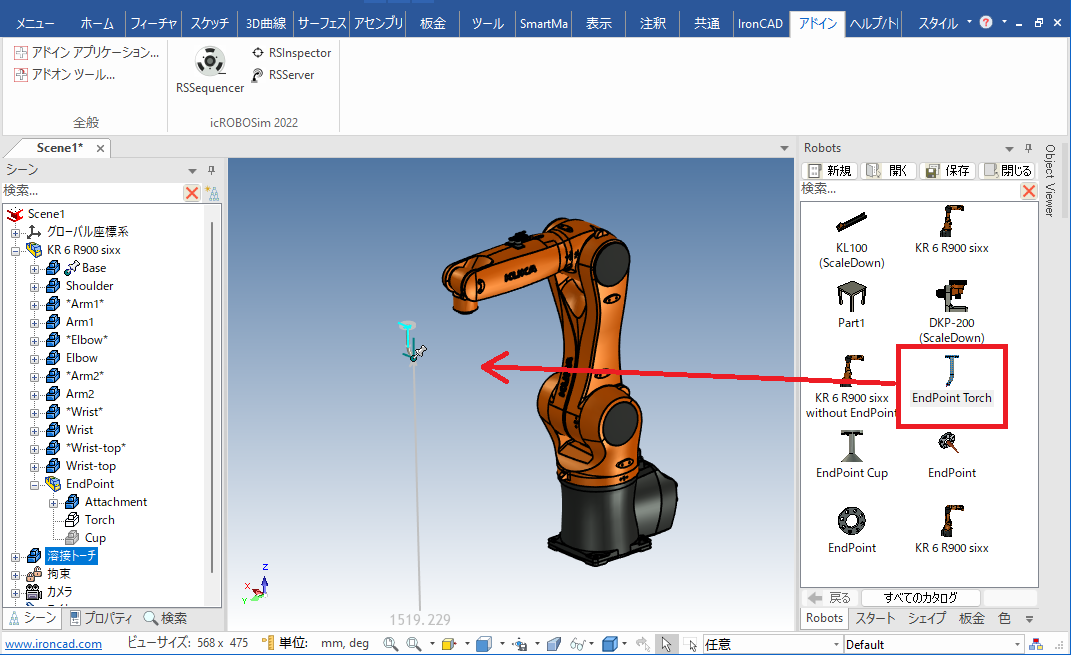
手順1. ハンドデータを読み込む
※ここではサンプルカタログを例に説明します。
カタログからツールデータをシーンへドロップします。
-
別途 icsファイル がある場合は、ホームタブの[パーツ/アセンブリを挿入]で読込みます。
その際、挿入オプションの[リンクとして読み込む]のチェックを外してください。
シーンに外部リンクされたデータが存在すると、一部の動きが正常に動作しません。
手順2. ハンドデータを移動する
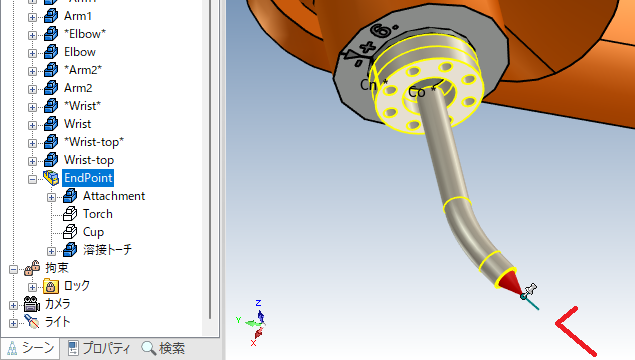
ハンドデータを左クリックでドラッグし、ロボットアセンブリ内の EndPointアセンブリ の中へ移動します。
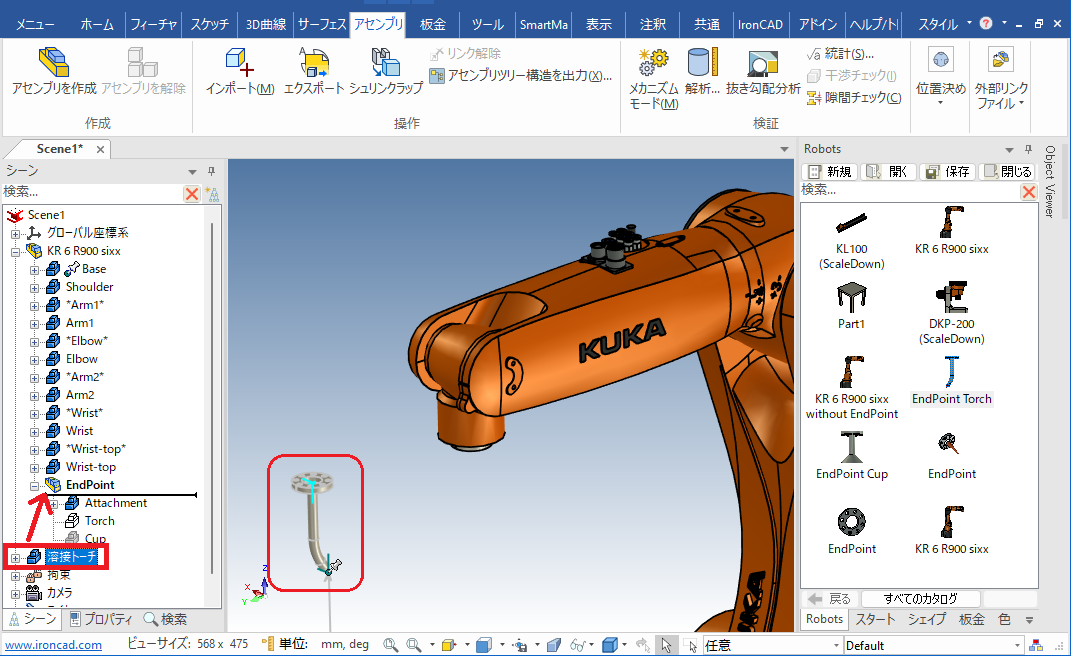
移動後
手順3. 位置を調整する
TriBall を使用し、ハンドデータの位置を調整します。

手順4. EndPoint のアンカー位置を設定する(ツール座標)
実際のロボットと同じくツール座標に相当する基準を決めます。
icROBOSim では、EndPointアセンブリ のアンカーが、ツール座標に相当します。
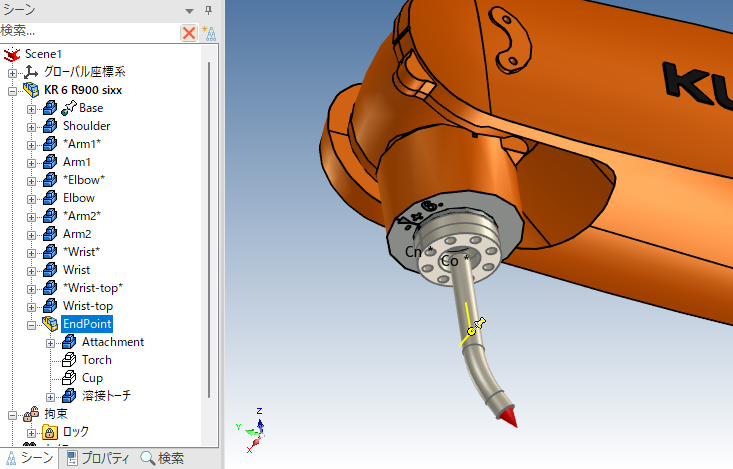
〔1〕EndPoint アセンブリを選択します。
〔2〕アンカーをクリックして TriBall を起動します。
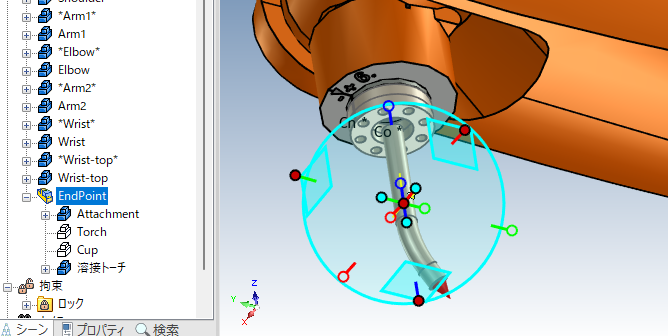
〔3〕ハンドツールの基準とする点に移動し、方向を設定します。
例)
- Lv.1(シミュレーションのみ)の場合は設定しなくてもシミュレーションは作成可能
- Lv.2 以降をご利用でコード出力する場合は、必ず RSSequencer に登録する前に設定してください。登録後にアンカーを移動すると位置がズレます。
※以下の手順5 は、治具などを配置後に、ワーク座標を設定できる段階になってから実施してください。